
Planning, disaster management, and safety challenges inherent in complex urban environments call for innovative solutions. Researchers around the world are progressing the field, drawing upon cutting-edge work using approaches such as the digital twin, voxels, the Light Detection And Ranging (LiDAR) to develop models and simulations with previously impossible levels of detail, accuracy and fidelity. In association with the University of New South Wales (UNSW), the European Association of Aerial Surveying Industries (EAASI) brought together four specialists from research institutes around Australia to share insights and advance knowledge on the potential of 3D urban models to take the field to the next level.
Professor Dr Sisi Zlatanova, Head of GRID Lab (Geospatial Research Innovations and Development) at the School of Built Environments, UNSW in Sydney, opened the session with her presentation Point clouds and beyond: the 3D modelling paradigm. The urban ‘digital twin’, a digital replica that enables convergence between the physical and digital states, has emerged as a hot topic in recent years. It is appreciated for its ability to support a wide range of applications from urban planning to smart cities to disaster management. It goes beyond a simple geospatial model, offering data on behavior, linkages between objects, and a range of other factors, enabling the fusing of both static and dynamic information from the real and digital worlds. Remote Sensing outdoor and indoor is becoming critical for 3D urban modelling, in particular, the 3D update and 3D analytics, dynamic analysis in particular. Better procedures are still necessary for 3D change detection as well as what is happening in 3D space, and future research would be wise to focus on these essential areas.
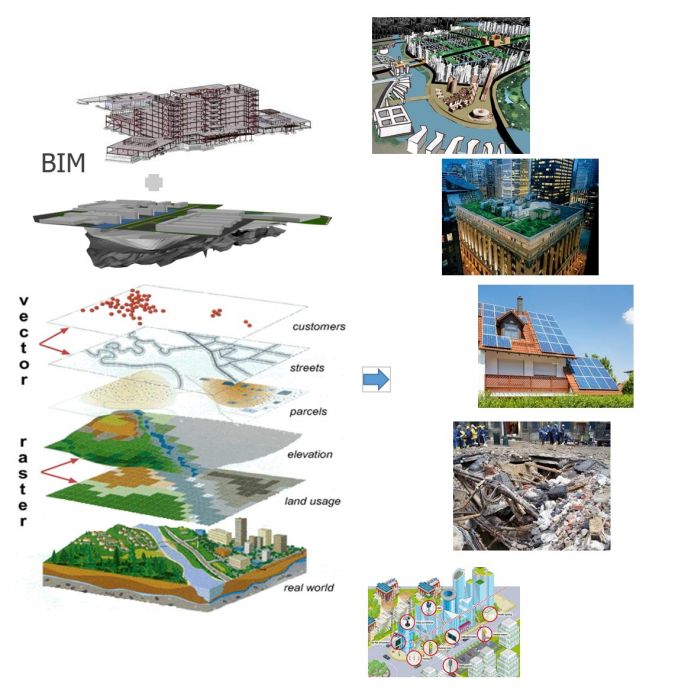
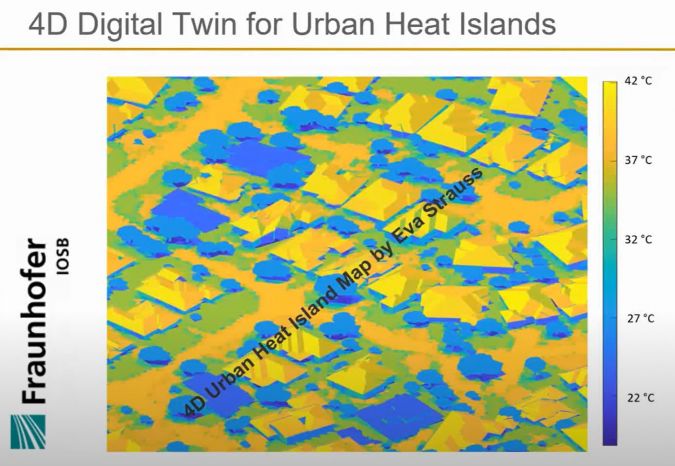
Dr Petra Helmholz is a Photogrammetry, Remote Sensing and Image Analysis expert from the School of Earth and Planetary Sciences at Curtin University in Perth, Australia. From point clouds and imagery to building outlines and models, Petra’s work on 3D city modelling and urban heat detection is conducted in conjunction with the Fraunhofer Institute in Karlsruhe, Germany. The level of detail is built up gradually, starting with a Digital Surface Model (DSM) derived from laser scanners or images, then extracting the terrain using a Digital Terrain Model (DTM). Vertical threshold limits are applied, a ground mask is created, and the final DTM created using a normalised DSM.
The aim is to generate an approximate building polygon model using the Moore contour-tracing algorithm as initial step, followed by a data-driven algorithm based on the geometric properties of the building. The accuracy of the model is dependent on two factors: the resolution of the images, and the resolution or density of the point clouds. Since the accuracy of the Moore contour-tracing algorithm approach is not as high as desired, additional mathematical modelling is applied. Both the Gauss-Helmert and Gauss-Markov models are used to adjust the building polygons, resulting in a much better outline that is more representative of the building mask, with an average error of .91cm to 1m for a study area of 126 buildings in Perth. Due to the complexity of Australian metropolitan house design, additional modelling was required to achieve a complete semantic 3D model, and simulation of surface temperatures to develop a 4D digital twin for urban heat islands. In recent years, data images have become denser, with increased spatial, temporal and spectral resolution enabling the creation of more detailed, accurate models. These models facilitate the work of end-users including urban planners, supporting the overall goal of creating more liveable cities.
Dr Jack Barton, manager of the GRID Lab at UNSW, trained as an architect and specialises in 3D mapping and urban modelling applications. He explained the potential of voxels for processing and analysis, sharing some new methodological approaches. Sydney’s Harbour Bridge and Opera House present challenges for traditional modelling due to their renowned complexity, and voxels provide a simple solution. Voxels are a 3D pixelated approach that is discrete, with myriad applications including medicine, geomatics and built environment research. Voxels are useful for models since they provide valuable data at the volume level beyond what 2D or vector analysis can offer, providing visibility analysis for shadow casting and other volumetric analyses. LiDAR is increasingly used in Australia to collect massive amounts of point cloud data across large areas, marking up and adding layers of semantics to existing data supporting analysis of spaces. Voxels enable much greater, granular detail to be identified, introducing intelligence in point clouds to allow easier object identification and definition, thus improving and speeding up data analysis processes.
Voxels are also useful for indoor volume computation, combining large-scale topographic maps, aerial LiDAR or photogrammetric point clouds and available Building Practice Data to estimate volumes and floor areas per housing unit. These voxelised data allows to rapidly and efficiently reveal critical information that cannot be obtained using traditional vector-based techniques. This intelligent approach has multiple applications, including emergency planning, path modelling and dynamic wayfinding in public buildings. It enables intelligent modelling of emergency evacuation factors such as smoke, gas and fire within buildings, delivering critical data to inform planning.
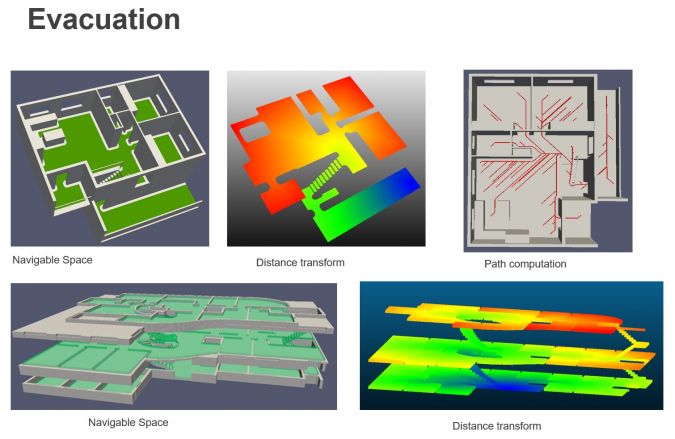
Combining voxelisation with point clouds delivers both 3D and 4D rapid analysis and simulations to inform planning, specifically in emergency response. Further research in the area of octree navigation modelling offers the potential to reduce the computational complexity, control details and most importantly provide space analysis.
With expertise in autonomous mapping, positioning, and 3D computer vision, A/Prof Dr Kourosh Khoshelham, University of Melbourne, talked us through LiDAR for autonomous driving. Autonomous driving remains controversial given that most people think of totally self-driving vehicles, although there are actually five levels of autonomous driving, with self-driving under all conditions unlikely to be implemented widely in the near future. Human error contributes to 94% of road accidents, and automation in driving can directly address this, leading to safer roads, improved traffic flow, reduced emissions and improved mobility for people with special needs. LiDAR can assist with driving scene perception, generation of high definition maps and vehicle positioning and is more accurate in varied weather conditions than cameras, whereby safety and performance concerns can arise with inclement weather.
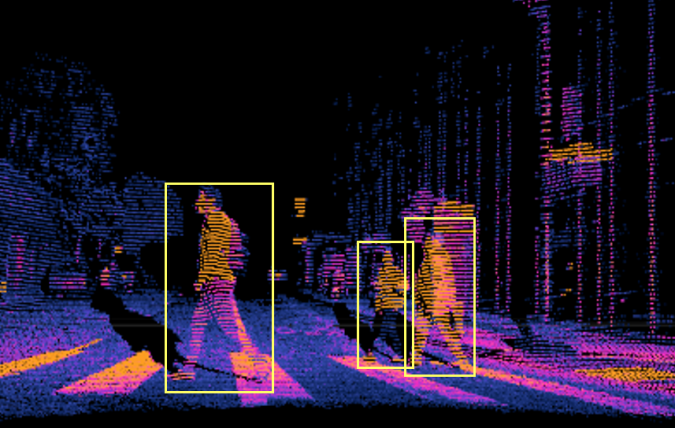
Advanced machine learning models are trained by manually labelled data, which when deployed, can identify and locate objects in the road environment. Machine learning based on combination of LiDAR and camera is far more accurate at over 98% than either method alone. The need for annotated data is a challenge for the classification of point clouds on a larger scale to generate detailed 3D maps of road environments. Scene adaptation and transferability across different environments is another challenge, since road environments differ across cities and countries. Machine learning is the key that will unlock the full potential of autonomous vehicles in the futures.
The frontier of 3D urban models using aerial survey data is currently being forged, and the fidelity, accuracy and level of detail possible via these novel approaches make this one of the most exciting areas in our field. Readers are encouraged to grab a coffee, sit down and enjoy the webinar on YouTube in full, and to reach out to Marcos Martinez at EEASI with any questions or for more information: info@eaasi.eu.