
An inertial navigation system (INS) is a critical part of a surveyor’s armoury. The measurements provided by the INS, including heading, pitch/roll, timing and absolute position, ensure that surveyors can confidently measure their environment, safe in the knowledge that every area and angle is covered precisely.
A strong survey INS for precise applications will provide heading accuracy of at least 0.1°, 2cm or less position accuracy and pitch/roll accuracy of around 0.05°. It should also provide additional features, such as Lidar integration, to help to streamline a surveyor’s work and allow them to do more of what they’re good at…surveying.

There is an almost endless list of survey and mapping applications for which an INS is a more-than-useful tool. For example, building information modelling (BIM), forestry survey, coastal monitoring and infrastructure exploration applications can all benefit from the measurements provided by an INS. One application in particular that will profit from the measurements mentioned above is a road survey.
Road Survey
When talking about road surveys, it is important to distinguish between road construction surveys and the surveying of existing roads as these projects each have unique requirements.
It is very rare that a new road being planned will be able to go direct or ‘straight’ from its origin to its destination. A survey must first be undertaken to analyse the route and identify any potential features that need to be taken into consideration. These can include natural features such as hills and rivers, where a tunnel or bridge may be required, to manmade features such as buildings and other infrastructure that will need to be navigated. Once a route has been identified, the land will again need to be surveyed to identify any slopes or environmental features that an engineer will need to pay attention to during construction.
In this scenario, where an INS is coupled with a survey device such as a Lidar sensor, the system will provide invaluable information to the project team. The absolute position, coupled with inertial measurements, will grant the assurances needed that the chosen route has been fully surveyed and all potential hazards have been identified and can be taken into consideration at the next stage of planning. When pairing the position and inertial measurements obtained by an INS with data collected by a Lidar sensor, a surveyor can create a highly accurate 3D point cloud of their environment that can be used time and again to analyze the route.
It is critical to get this process right first time as anything that is missed can lead to delays and additional unaccounted-for project costs. The absolute, centimeter-level global position accuracy provided by an INS gives the surveyor confidence that the exact route has been mapped and there is no position drift.
In the case of existing road infrastructure, the survey may still be a long baseline survey. However, rather than assessing the suitability of a route, this will aim to understand more about the road’s current state, degradation over time and potential hazards such as overgrown foliage, newly formed potholes and/or manmade obstructions.

In the past, this type of road survey has been particularly difficult and there are three main factors to consider: road surveyor safety, road user safety and keeping disruption to a minimum – all whilst collecting the best possible data in the required timeframe. This is not such an issue on minor road networks. However, when the survey moves to busier roads and motorways, it becomes increasingly difficult to ensure safety with little to no disruption.
Innovations in survey technology, such as INS and Lidar integration, have enabled surveying to be moved from the road to the roadside or to be carried out whilst driving, thus reducing the risk associated with road surveying.
An INS will again provide surveyors with confidence that the entire stretch of road has been surveyed and every hazard accounted for. It also provides the data necessary to create a georeferenced point cloud. Additional integration with Lidar sensors will also provide surveyors with the ability to use the point cloud of the existing road for continuous and repeatable analysis.
Furthermore, the INS data coupled with the Lidar data will allow surveyors to understand areas that may need to be resurveyed using accuracy diagnostics.
To keep up to date with the latest mobile mapping news, follow the OxTS Mobile Mapping LinkedIn page: OxTS Mobile Mapping
UAV-based Mapping
In the case of a long baseline survey, such as that of a road, many surveyors would have ordinarily used a mobile mapping vehicle such as a car. However, thanks to the advances in drone technology, unmanned aerial vehicles (UAVs or ‘drones’) are beginning to change the way in which surveyors look at conducting this type of survey.
In the past, UAVs have not always been suitable for this type of work since a long baseline survey can be several miles long. Because the survey (Lidar) and navigation (INS) devices have a negative effect on the weight of the payload, flight times have tended to be greatly reduced.
Fast forward to today and advances in technology are fast-flowing. New UAV power sources, such as hydrogen fuel cells, are enabling UAVs to stay in the air longer and carry heavier payloads. At the same time, survey technologies such as INS devices are getting smaller and lighter whilst still being able to offer highly accurate measurements.

To keep up to date with the latest UAV-based mapping news, follow the OxTS UAV-based Mapping LinkedIn page: OxTS UAV-based Mapping
Inertial Navigation Systems
A case in point is the new OxTS xNAV650 INS which has been developed with surveyors in mind. Its small size (only 77 x 63 x 24mm) coupled with its light weight (just 130g) makes it an ideal partner for UAV and drone-based survey and mapping applications. However, the xNAV650 is not limited to UAV and drone surveying, as explained in more detail below.
Despite its small size and weight, the xNAV650 does not compromise on performance with 0.1° heading accuracy, 0.05° pitch/roll accuracy and 2cm RTK/PPK position accuracy.
The xNAV650 also has additional software integrations and features that help surveyors focus on what they’re good at – surveying.
Lidar sensors are used in many surveys to help surveyors build up a 3D picture of the environment they are surveying. These point clouds provide surveyors and engineers with critical information that helps them make important project decisions – such as decisions about road/highway route analysis and preparation.
But georeferencing this data to take advantage of the benefits mentioned above in this article can, in many cases, take time. Not many surveyors are, or even want to be, software engineers, so whilst the will to integrate INS and Lidar data is there, it hasn’t always been practical – until now!
By using Lidar georeferencing software (such as OxTS Georeferencer) alongside the xNAV650 or an alternative INS from OxTS, users can quickly and easily georeference their Lidar data.
A list of compatible Lidar sensors can be found on the OxTS website: www.oxts.com. You can also find out more about our work with Velodyne LiDAR, Hesai and Ouster by viewing the technology partner pages.
Simple Lidar integration is only one part of the OxTS Georeferencer and xNAV650 story. Activating the Boresight Calibration feature within OxTS Georeferencer allows users to take advantage of a data-driven approach to calibrating the angles between their navigation (INS) and survey devices.
This calibration technique can be set up and performed quickly and easily, helping surveyors speed up their ‘time to survey’. You can find out more about our Lidar Surveying and Boresight Calibration capabilities by downloading the associated brochures from our website.
“As an engineer I do not know a simple tool which could precisely measure angles between INS and Lidar to a thousandth of a degree. OxTS has solved this issue elegantly with the usage of the tools they already have present for Lidar surveying. Running a ten-minute data collection between two reflective targets (which are cheap to build) is the most difficult part. Given the well-documented OxTS guides, the next step is a simple matter of selecting the collected data files in OxTS Georeferencer and pressing the ‘Run Boresight Calibration’ button. It really is as simple as that. After specifying the calculated angles, the point cloud accuracy improved significantly even visible to the human eye.”
Andri Karo, Systems Integration Specialist, SKYCORP
Surveying using an INS
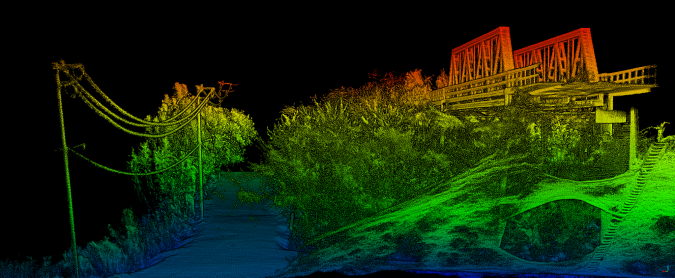
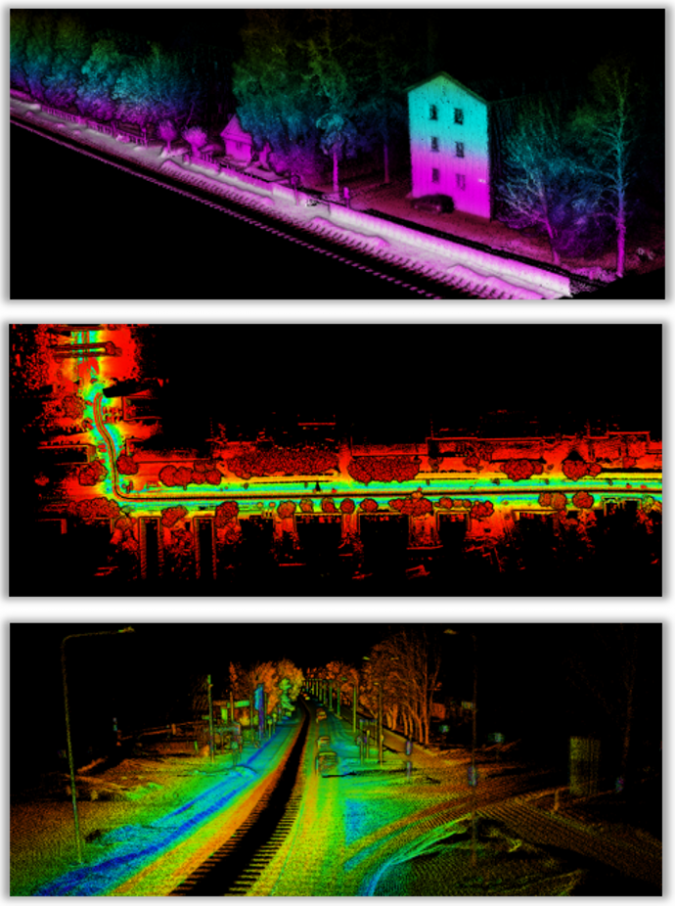
OxTS partner SKYCORP is an Estonian manufacturer of hydrogen-powered drones who successfully used the xNAV650 to conduct a road survey. SKYCORP used:
- The xNAV650’s quad-constellation, GNSS positioning capabilities to provide centimetre-level position accuracy. This gave SKYCORP the ability to conduct the long baseline survey of the road.
- An Ouster OS1-64 Lidar and georeferenced the data using OxTS Georeferencer.
- Alongside the INS and Lidar, SKYCORP utilized the Boresight Calibration tool to ensure that the setup was finely calibrated. This produced consistent and repeatable survey data. The setup was made simpler still by using the new OxTS precision time protocol (PTP) feature which uses an ethernet ‘plug and play’ setup.
The results obtained are shown below:
Conclusion
Usually seen as the bridesmaid rather than the bride of the surveying world, the importance of the INS in any long baseline survey, not just a road survey, cannot be understated.
Providing surveyors with highly accurate position and inertial measurements gives them the confidence they need to move on to the next stage of their project, safe in the knowledge that every part of the route has been covered – and covered well.
For more information on how to use an INS to help you streamline survey setup and get the best possible results contact OxTS today.