Automatic segmentation of point clouds in architecture
Extending the existing methods for creating digital twins
A new algorithm has been developed that automatically identifies architectural elements and creates 3D models of building interiors. Over the last decade, the demand for digital twins has increased in the AEC/FM domain. Additionally, point clouds are used to create 3D models within BIM methodologies. Called ABM-indoor, the algorithm works with organized and unorganized point clouds and provides 3D models of buildings in vector format. Efforts are now underway to transfer this model to IFC.
The authors developed the ABM-indoor algorithm out of the need to extend existing methods related to automatic processing of point clouds for building information modelling (BIM), especially in the domains of architecture, engineering and manufacturing (AEC) and facility management (FM). The proposed approach has two main objectives: 1) automatic classification of the elements of organized and unorganized point clouds (floors, ceilings, walls, columns, etc.), and 2) three-dimensional modelling of the classified elements according to an LOD 300 model.
The approach focuses on the geometric information of point clouds. Two datasets were used to test ABM-indoor. One of the point clouds represents an office space with an area of approximately 800m2 and three million points. It was obtained from a static terrestrial laser scanner (TLS). In this case, the data acquisition performs multiple scans where the position of the sensor is known so the point cloud is organized. The second point cloud was acquired in a multistorey car park using a dynamic TLS, NavVis M6, an indoor mobile mapping system (MMS) with six cameras that obtain 360° images, four laser scanners at various heights and a 6D simultaneous localization and mapping (SLAM) system. In this case, the point cloud is approximately 1,000m2 and contains 14 million points.
Methodology
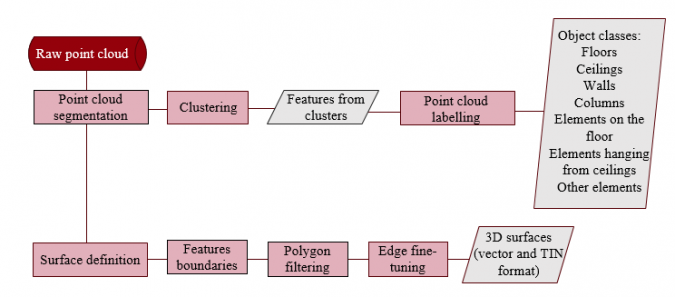
The ABM-indoor workflow has two main steps: 1) segmenting and labelling the point cloud using automatic clustering, and 2) creating 3D surfaces of each classified element (Figure 1). Floors, ceilings and walls are considered planar elements. On the one hand, a slicing method is used to identify the plane that best fits a cluster of points. Firstly, the algorithm identifies floors and ceilings as horizontal elements by using the height value. Secondly, ABM-indoor creates 3D surfaces of floors and ceilings using Delaunay Triangulation (Isenburg et al., 2006). Lastly, the algorithm applies minimum area constraints to eliminate irregular and useless surfaces and performs automatic edge fine-tuning to smooth surface boundaries. Before classifying the rest of the point cloud, the algorithm defines the principle direction of the building using edges longer than four metres.
On the other hand, ABM-indoor uses the principle direction of the building and the cluster direction value to identify walls. To create surfaces from wall clusters, the algorithm first projects the boundaries horizontally using Helmert 3D transformation, and lastly applies polygon filtering and edge fine-tuning.
The algorithm also identifies non-planar elements, such as columns. Columns are vertical elements connected to the floor slab and to the ceiling of the building. ABM-indoor uses existing gaps in the floor and ceiling to identify points that are on the vertical between the two gaps.
Once the floors, ceilings, walls and columns have been classified and modelled, the algorithm processes the remaining points to identify non-planar elements. The approach identifies content elements, such as cars, motorbikes, tables, chairs, etc. To identify and model the aforementioned irregular elements, ABM-indoor uses a tetrahedrization algorithm (Romero-Jarén & Arranz, 2020).
Experimental results
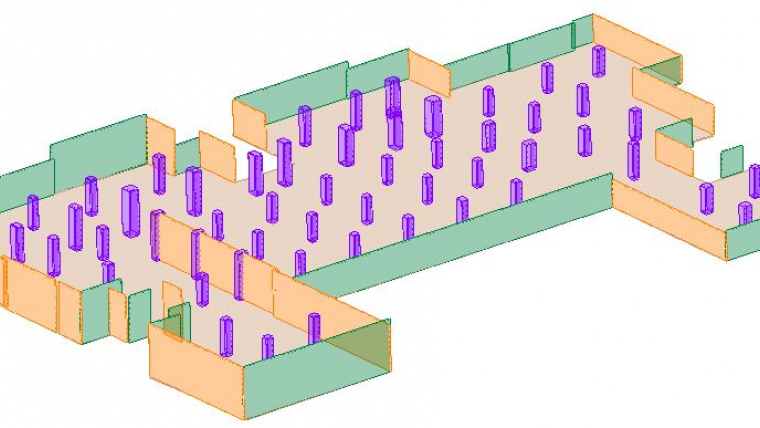
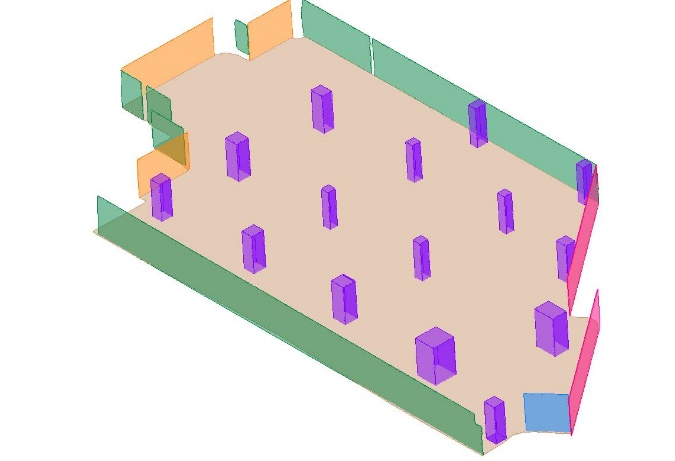
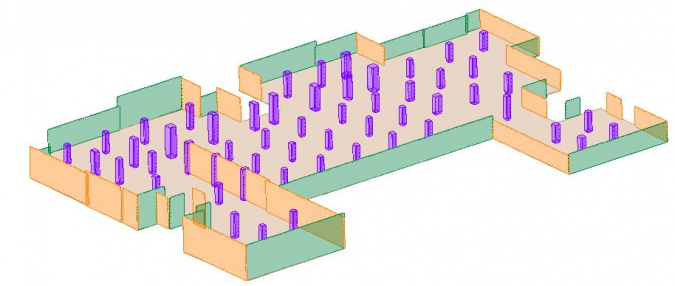
Two indoor datasets were used to test the algorithm: the office space (Figure 2) and the car park (Figure 3). In the office space, five dominant directions were established (x in orange, y in green, j in pink, k in blue, and z is height), whereas in the car park, three dominant directions were identified (x in orange, y in green, z is height).
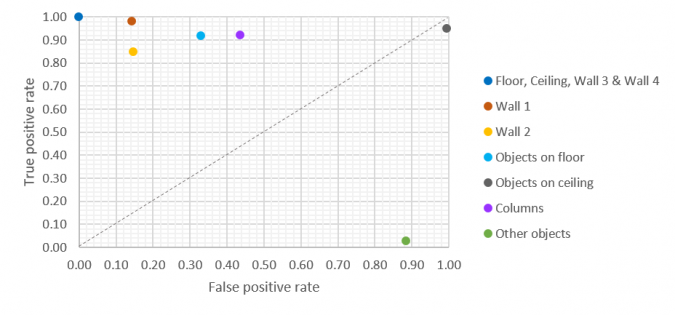
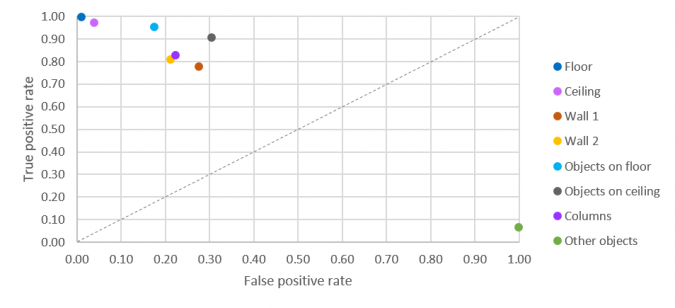
After processing the point cloud, the approach developed a precision analysis using a confusion matrix. The matrix results were used to calculate the false positive and true positive rates and these were plotted on a receiver operating characteristics (ROC) graph. Figure 4 shows the ROC graph for the office space point cloud classification. In this case, the best classified object classes are floors, ceilings and walls (directions j and k, Figure 2). For the car park point cloud, the best classified object classes are floors and ceilings (Figure 5). For both point clouds, the least favourable classification results correspond to the ‘Other Object’ object class. Nevertheless, both datasets were classified with a global precision of more than 90%.
Non-planar elements are located on floors or hanging on ceilings. As mentioned above, ABM-indoor uses a tetrahedrization algorithm to classify the points belonging to these elements in order to create 3D surfaces. For instance, Figure 6 shows the 3D model of a car located in one of the point clouds. Content elements are identified and modelled as individual elements.
Solution implementation
ABM-indoor has been incorporated as an additional module that works within the MDTopX (Digi21) software, which was created more than 20 years ago. It offers multiple tools for editing point clouds and digital models. MDTopX has an interface mainly based on toolbars and dialogue boxes, available in both English and Spanish. Nowadays it is used by dozens of national and international engineering companies and public institutions. The ABM-indoor module is based on functional and commercially available libraries of the MDTopX software.
Conclusions
ABM-indoor is an approach for automatically classifying and modelling unorganized and organized point clouds. The algorithm has an iterative workflow, as shown in Figure 1, which starts by classifying and modelling floors and ceilings, and continues with walls, columns and content elements. Only the geometric information of the point cloud was considered. Triangulation algorithms were used to create 3D surfaces of the elements. The authors tested the algorithm with two indoor datasets and the classification results had a global accuracy of over 90%.
The algorithm can be applied to point clouds from mobile and static systems. Since no constraints of horizontality or verticality have been imposed, the approach is capable of determining any deformations or inclinations of elements. Future work will involve studies related to deformation and displacements.
ABM-indoor provides files in vector format for planar elements and in TIN format for non-planar elements. The algorithm will be used to create as-built models (ABMs) of buildings. The authors are currently working to further improve the algorithm, since up until now ABM-indoor is limited to modelling visible elements. This needs to be complemented with data from drawings and the information gathered from inspections to consider hidden elements such as beams.

Acknowledgements
The study is based on an industrial PhD (in progress) in which two institutions cooperate: Universidad Politécnica de Madrid and Geolyder S. L. Spain, NIF: B86901543. The current project is jointly financed by the Community of Madrid, Spain, Project Reference Number: IND2017/TIC-7869 and the aforementioned company. Additionally, the authors express their gratitude to José Ángel Martínez Torres for assisting with the file format conversion.
Further reading
Che, J. Jung, M.J. Olsen, Object recognition, segmentation, and classification of mobile laser scanning point clouds: A state of the art review, Sensors (Switzerland) 19 (2019). doi:10.3390/s19040810.
R.Romero-Jarén, J.J. Arranz, Automatic segmentation and classification of BIM elements from point clouds, Automation in Construction 124 (2021). doi:10.1016/j.autcon.2021.103576.
Isenburg, Y. Liu, J. Shewchuk, J. Snoeyink, Streaming computation of Delaunay triangulations, ACM Transactions on Graphics 25 (2006) 1049–1056. doi:10.1145/1179352.1141992.


Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















