Co-seismic Displacement Estimation
Improving Tsunami Early Warning Systems
Geomatics is not primarily aimed at investigating the causes and physical phenomena related to earthquake events. It has, however, over recent years established a fundamental role in monitoring and describing changes to the Earth’s surface. In particular, this article describes the state of the art of the GPS contribution to Seismology, and presents an innovative methodology, VADASE, that enables accurate estimation of co-seismic displacement waveforms in real time using standard broadcast products and high-rate carrier-phase observations collected by a unique GPS receiver. This represents a potential enhancement to GPS Seismology and an effective support for tsunami early warning systems.
The great earthquake (M=9.0) which hit the Japanese Island of Honshu on 11th March 2011, generating a tremendous tsunami, drew attention once more to tsunami early warning systems. Unfortunately, in this case very little or nothing could have been done to avoid the large number of victims, widespread damage and fear induced by the severe accident that befell the Fukushima nuclear plant due to the strength of the earthquake and the proximity of the epicentre to the Japanese coast. Nevertheless, tsunami warning systems represent a fundamental infrastructure for the protection and safety of people over a large area of the world, mainly along the Indian and Pacific Ocean shoreline. And as a matter of fact, two important tsunami early warning systems are already working in these areas of the world, deployed after the great Sumatra earthquake (MW= 9.1) of 26th December 2004 (website 1) by the US NOAA Pacific Marine Environmental Laboratory and by a joint German-Indonesian cooperation (website 2). Meanwhile, several studies over recent years have demonstrated the potential effective use of GPS in estimating co-seismic displacement waveforms, so-called GPS seismology (Blewitt et Al., 2009; Bock et Al., 2000; Kouba, 2005; Larson et Al., 2009), with accuracies ranging from a few millimetres to a few centimetres. This contribution is of particular relevance, offering as it does possible support for both modelling of fault rupture and computation of important seismic parameters such as seismic moment and magnitude (Mw) which can be estimated without the problems of saturation that commonly influence seismometers close to large earthquakes (Bock, 2010) (website 3).
These studies were developed mainly offline, analysing the GPS data acquired during strong earthquakes, and then, over the subsequent at least ten years, well-known processing strategies (single precise-point positioning and differential kinematic positioning) were developed to reduce as far as possible the latency between earthquake occurrence and estimation of co-seismic displacement waveforms. A key factor in these advancements has been played by technological developments resulting in very high-rate (up to 100Hz) GPS measurements. The Real Time GPS Science Requirements Workshop held in September 2007 in Leavenworth, Washington, USA, adopted the challenge of achieving 1-cm real-time GNSS displacement accuracies in the global reference frame within three minutes of an earthquake (Blewitt et Al., 2009).
GPS Seismology
So up until now, two main approaches have been used in GPS Seismology: single precise-point positioning, and differential kinematic positioning. Single precise-point positioning requires precise, or at least rapid ancillary products such as orbits, clocks and Earth Orientation Parameters which are not currently routinely available in real-time at the necessary accuracy. This approach uses dual-frequency observations acquired from a single GNSS receiver, and supplies a-posteriori high accurate displacements within a global reference frame. The real-time capabilities of this approach are limited by the accuracy of required ancillary products, the precision of which decreases with time latency.
Differential kinematic positioning is based on a complex and continuously linked infrastructure, a GPS permanent network, in order to obtain high accuracy in real time (Instantaneous Positioning). Such analysis requires a GPS permanent network with maximum average inter-station distance of up to tens of kilometres, and common processing of collected data at a centralised analysis centre. Although this technique is able to guarantee accuracy at 1-cm level, it provides in real-time only relative positions with respect to a reference station. This implies a serious limiting factor in relation to strong earthquakes, which may involve the entire area covered by the permanent network. In fact, it is likely in such events that the reference station will itself undergo co-seismic displacement, and therefore only relative co-seismic displacements, not within a global reference frame, may be recovered in real-time all over the network. To overcome this drawback, baseline would lengthen to search an external reference station, resulting in lower accuracy.
The Third Road
It is within this framework that we here present a novel approach named VADASE, with which we are able to estimate accurate, co-seismic displacement waveforms in real time, using standard broadcast products (orbits and clocks) and high-rate (1Hz or more) carrier-phase observations continuously collected by a GPS receiver. Since no other data is needed than those routinely collected by a standalone GPS receiver, the algorithm can in principle be directly embedded in the receiver firmware. Simple transmission equipment may be added to allow communications in case of a defined displacement threshold being exceeded. Using such a configuration, in the event of an earthquake the waveform could be retrieved in real time with centimetre accuracy and immediately transmitted to a remote control centre which would decide on possible tsunami alert.
Up to now, however, the software has been implemented only in a preliminary release capable of working using standard RINEX observations and navigation files as input data. This step was necessary to test the functionality of the algorithm and to confirm its low computational burden. VADASE was recognised as a simple and promising approach towards the fulfilling the above goal, and it was awarded the DLR Special Topic Prize and First Audience Award in the European Satellite Navigation Competition 2010 (Colosimo et al, 2010).
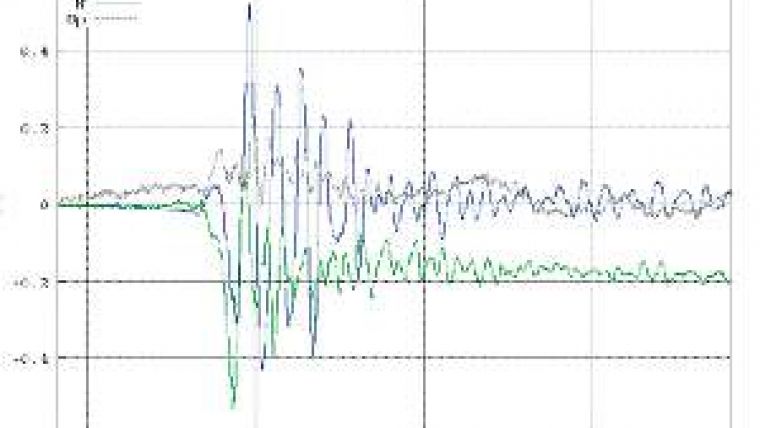
The effectiveness of VADASE has been shown through its application to the Baja California (Mexico) earthquake (Mw=7.2) of 4th April 2010 (website 4), where UNAVCO-Plate Boundary Observatory station P496 data (5Hz) were considered (see Figure 1, above), and to the great Honshu Japanese earthquake (M=9.0) of 11th March 2011 (website 5), where the data (20Hz, the first time that such an high-rate solution for GPS seismology was provided) collected at JA01 site at Chofu, 370km from the epicentre and jointly managed by the Japan Aerospace Exploration Agency (JAXA) and German Aerospace Centre (DLR),were analysed (Figure 2).
As regards the Honshu earthquake, it is important to underline that we applied VADASE in offline mode to the observations (1Hz) collected at the International GNSS Service (IGS) sites of MIZU, at Mizusawa, 140km from the epicentre, and USUD, Usuda, 430km from the epicentre, as soon as the data were available on the IGS public site, and we were able to supply the very first internationally found results for the co-seismic displacement waveforms, just few hours after the event.
Concluding Remarks
Following the ESNC 2010 Special Topic Prize, a fruitful cooperation began with DLR to improve the VADASE algorithm, including its extension to the future Galileo constellation, and to exploit its real-time capabilities. As a preliminary result of this work, VADASE has been used to analyse data streams coming from one of the permanent DLR EV-network stations; Figure 3 below shows its displacements over a short time span.
These results lead to two basic conclusions: firstly, they clearly show the potential of VADASE for real-time co-seismic displacement waveform estimation, especially if implemented directly in GNSS receiver firmware; secondly, they claim rapid implementation of high-rate (1 to 10Hz) acquisition at as many as possible public GPS sites, starting from the International GNSS Service (IGS) (Dow et al, 2009) tracking network. In this last respect, GPS could become a fully operational system able to support estimation of both slow deformations (pre- and post-seismic) and co-seismic displacement and waveforms.
Finally, it should be noted that VADASE may also supply useful results as applied in other contexts, such as monitoring of large structures and infrastructure: bridges, skyscrapers and towers.
Acknowledgments
The authors recognise the fundamental role played by the IGS in delivering high-rate GNSS data in near real-time. The VADASE approach, as described in this paper, is the subject of pending patent.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















