Geomatics Developments in Asia
14th International Scientific and Technical Conference 'From Imagery to Map: Digital Photogrammetric Technologies'
The International Scientific and Technical Conference was held for the 14th time from 20-23 October 2014 in Hainan, China. This year’s conference, which was themed ‘From imagery to map: digital photogrammetric technologies’, was opened by Victor Adrov, managing director and co-founder of Racurs, Moscow, along with SmartSpatio from Beijing, China, as organiser of the event. One of the features of this event is the shift of venue every year; 2014 was its first time in Asia, and China was chosen because of its rising influence on the geomatics market.
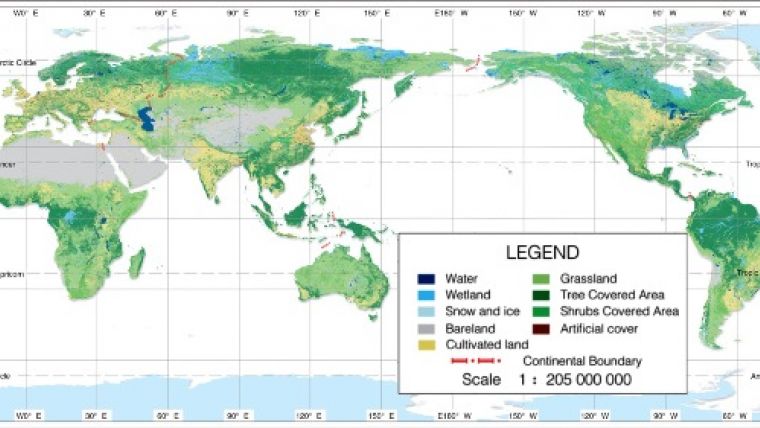
Prof Chen Jun, National Geomatics Center of China, not only addressed the audience during the opening as ISPRS president but also presented a unique product and multi-million-dollar project developed by his home country: the world's first 30m global land cover dataset. The GlobeLand30 marks 10 land cover types, entails the entire planet (Figure 1) and has been created from 10,270 Landsat scenes recorded in 2000 and 9,907 Landsat scenes and 2,640 Chinese HJ scenes captured in 2010. The dataset, which has an overall accuracy of 83.50%, was donated to the UN on 22 September 2014. It is accessible free of charge for users all over the world through web services (see globallandcover.com). After the opening address, Georg Konecny from Leibniz University Hannover, Germany, discussed the current status of global geospatial information and database issues for urban mapping. Armin Grün from ETH Zurich, Switzerland, focused on 3D modelling from UAS images, mobile mapping and terrestrial laser scanner (TLS) point clouds, discussing among other things the project to 3D model the 150m-high Shukhov Tower in Moscow, Russia (built between 1919 and 1922) from 100 million TLS points – a subject which has also been covered by Mikhail Anikushkin and Andrey Leonov in GIM International (July 2014). Mathias Lemmens from Delft University of Technology, The Netherlands, spoke on features of massive point clouds and functionalities of processing software and mentioned his current preparation work on a book about the acquisition, processing and management of point clouds which is scheduled to be published by Whittles Publishing, UK, in early 2016.
Aerial Cameras and Software
Yuri Raizman from VisionMap, Israel, reviewed the A3, a camera system covered extensively in GIM International (June 2014) as part of the series on oblique photogrammetry. Beijing Geo-Vision, founded in 1989, presented its SWDC-4 aerial camera – pixel size 6µm, image size 16K x 12K pixels and a 8-/12-bit radiometric resolution. The focal length is either 50mm or 80mm, resulting in an along-track field of view (FoV) of 74o or 49o degrees respectively and an across-track FoV of 91o or 59o. The SWDC-5 is an oblique camera system constructed as a Maltese cross, i.e. one camera is looking nadir and four are spaced at 90o intervals around the nadir-looking camera and tilted 45o to capture obliques. The firm also supplies the JX-4G, a semi-automatic DPW with two hand wheels and one foot wheel. Alexander Chekurin, commercial director and co-founder of Racurs, discussed the accuracy and contents of SPOT 6 & 7 imagery. The images are suited for creating/updating 1:25,000 topo maps. Most objects can be recognised in mono imagery, although mapping of steep banks and road edges requires stereo views while power lines and the like need extra data – as does the detailing of building use, types of road surfaces, load strength of bridges, etc. Andrey Sechin, scientific director and co-founder of Racurs, presented the upcoming release of Photomod 6.0 with two novel features: 64-bit computing and dense image matching (DIM). A 64-bit system optimally explores the random access memory (RAM) as it places virtually no restrictions on the RAM size, while 32-bit systems are limited to 4GB of RAM. As photogrammetric processing involves massive volumes of input and output data, 64-bit systems bring huge gains: fast rectification and mosaicking in the production of orthoimagery, optimised distributed processing, fast DIM computation and simultaneous processing of a large number of satellite images, to name but a few. An earlier version of DIM was based on cross-correlation, which generates smooth edges causing a Cappadocian tuff look of buildings. Furthermore, it does not cope well with occluded areas and thus is primarily suited for the production of orthoimagery and contour lines. The performance of the DIM included in version 6.0, called the iterative deformation method (IDM), imports both aerial and push-broom imagery (Figure 2). It relies heavily on the number of overlaps used to generate a height point – at least four overlaps are recommended.
Asian Space Imagery
The second day of the event was mainly devoted to Earth observation (EO) from space. JSCRussian Space Systems, Moscow, presented the features of a planned constellation of three satellites, called Resurs-P, the first of which was launched on 25 June 2013. The optical imagery aims at map updating, environmental monitoring and exploration of resources. The satellite orbits at a height of 475km with an inclination of 97.28o while the revisit time is 3 days. The ground sample distance (GSD) of the PAN mode of the Geoton-L1 sensor is 1m and 3-4m for the multispectral (MS) mode, capturing blue, green, red, red edge (0.72-0.80µm) and NIR (0.81-0.88µm). In-track stereo images can be taken with a swath width of 38km and an along-track length of 115km. The hyperspectral sensor has a swath width of 30km, a GSD of 25-30m and captures 130 bands in the spectral range of 0.4-1.1µm, with each band having a spectral width of 5-10nm. The medium-resolution sensor can provide images with a GSD of either 12m or 59m in PAN mode and 24m or 118m in MS mode. As usual, EO imagery products with an increasing level of processing are offered from images with radiometric and geometric correction only to georeferenced and pan-sharpened standard. China is developing a constellation of 4 VHR satellites called ZY-3. The first one was launched in January 2012. Orbiting at a height of 506km and with a revisit cycle of 5 days, the spacecraft has on board a nadir-looking scanner (GSD 2.1m) and two scanners (GSD 3.6m), one looking forward and the other backward, both under an angle of 22o. The imagery is suited for stereo mapping at scale 1:50,000 and DEM creation and updating (see Figure 3, an image of Dubai). On 30 April 2014 Kazakhstan launched a very-high-resolution (VHR) EO satellite, the KazEOSat-1 which was built by Airbus Defence and Space, France. Designed for a lifespan of over 7 years and placed in a 750km orbit, it captures 220,000km² daily and can revisit any area in Kazakhstan within three days. The GSD of the PAN mode is 1m and the push-broom scanner can be pointed off-nadir. On 20 June 2014 it was joined by a medium-resolution EO satellite, the KazEOSat-2, built by Surrey Satellite Technology (SSTL), UK. With a swath width of 77km it will capture MS images with a GSD of 6.5m for agricultural and resource monitoring, disaster management and land use mapping. In addition to speakers from Russia, China and Kazakhstan, representatives of DigitalGlobe and Airbus Defence and Space presented overviews of their space images and derived products.
Producing image data from orbiting platforms is one thing, but successfully taking them to market is a different matter altogether. China, Russia and Kazakhstan repeatedly underlined their keenness to collaborate with firms and agencies in other countries. Alan Kazkenov from Kazakhstan Gharysh Sapary declared: “Kazakhstan is ready to enter into the world space community with its services to provide remote sensing data which can be used by other countries. We are open for dynamic dialogue and mutually beneficial cooperation in the field of ERS data application.”

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















