Handheld 3D laser scanning in underground heritage documentation
Capturing, protecting and spreading knowledge about history using modern technologies
Read how SLAM technology was used to scan a former mine complex in Poland to ensure safety during a project to preserve the site's historical, educational and functional significance.
Underground cultural heritage is the term used to describe the numerous sites – both natural and man-made – beneath the Earth’s surface that can contribute to knowledge about the history of the planet. To preserve the surroundings, environments with rich geometrical features, enclosed spaces and places without natural light must be measured and captured in an appropriate way. This article outlines the use of a GeoSLAM Zeb Horizon scanner at a historical mine complex in Poland featuring multiple passageways and two levels of drifts, some of which were also flooded.
Cultural heritage has become widely recognized by the international community as a pro-development factor which helps to spread knowledge about the past in modern societies. In this context, underground sites of both natural and man-made origin can have historical, educational and functional importance. All kinds of mining activities have had a huge impact on the evolution of architecture and construction over the centuries. There is growing awareness of this, as illustrated by the rising interest in transforming former mines and their adits and drifts (entrances and passageways) around the world into museums and tourist attractions.
Safety first
In any such transformation project, the first consideration must be safety – both of the workers who are opening up the mine and subsequently of the tourists who will visit it. Therefore, it is necessary to determine the movement of the rock mass above the passageways, conduct deformation assessments and investigate all other rock mass processes in order to protect the historical significance of the sites and ensure that the future tourist attraction will be secure. All of this requires a lot of data to be collected and managed. This means that engineers and researchers are constantly searching for more efficient spatial mapping and documentation solutions. SLAM technology can offer the answer.
SLAM technology
Simultaneous localization and mapping (SLAM) technology has been evolving for many years and is now applied in numerous fields. A device based on SLAM can simultaneously localize (locate itself in the map) and map (create a virtual map of the measured space). It computes a ‘best estimate’ of where it actually is. New positional information is gathered every few seconds, features are aligned and the estimation is continuously improved. Probably one of the biggest advantages of SLAM is that it can do what GPS cannot. Since GPS relies on triangulation between satellites, it must be able to ‘see’ the satellites. This means that it does not work underground. SLAM does not have this problem, because it operates within the space itself, recording the surroundings and remembering the route.
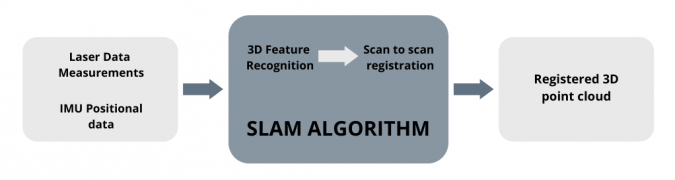
In its first step, the GeoSLAM Zeb Horizon handheld laser scanner utilizes both laser scanning data and inertial measurement unit (IMU) data. Thanks to 3D feature recognition, the scanner is able to identify and record its location in any space as the surveyor moves around. In this case, ‘features’ are any areas with a unique geometry, measuring at least 1 metre in size and located no more than 40 metres away from the device – although the GeoSLAM Zeb Horizon has a range of 100m, according to the manufacturer. Based on the features, the scans are registered (scan-to-scan registration) to produce a registered 3D point cloud as the final result. This does not required any further matching. Therefore, the noticeable advantage of SLAM technology is the speed at which a final registered point cloud can be obtained.
Research at the Riese Complex in Poland
The Riese Complex is located in the Owl Mountains in Lower Silesia in Poland, near the Czech border. The Riese (which means ‘huge’) was one of the largest mining and construction projects by the Germans during World War II. It is unclear whether it owes its name to the number of people working on its construction, the intended amount of concrete used, or the size of the adjacent infrastructure. To this day, the purpose of the building is unknown since the whole project was top secret. Six underground structures have since been discovered.
The biggest area of the Riese is the Włodarz Complex which is open to tourists as an underground museum. It comprises 3,000m including many straight passageways and two levels of underground adits or drifts, some of which are flooded. This was therefore a very challenging environment in which to use the scanner.
Field measurements
This project included the use of several surveying technologies in the field; besides conducting measurements with the GeoSLAM Zeb Horizon handheld laser scanner, the team performed terrestrial laser scanning (TLS) with a Faro Focus 3D, classical tacheometry and GNSS (needless to say, this was done outside the adit).

In case of handheld laser scanning, it is recommended to make some preparations before taking the exact measurements. The preparatory steps include planning the capture route and the start and finish locations in relation to the project, making sure that there are enough features for scan registration, planning the loops and loop closures, and estimating the number of scans to register the whole area of interest. Moreover, it is crucial to remember that each loop must be completed (start and finish in the same place) within a maximum of 20 minutes. Closing the loops is very important for the SLAM accuracy, with more loops equalling better accuracy. Since the Włodarz Complex is arranged in a grid layout, it was easy to plan the loops on each level. However, it was important to plan measurements and loops through all the levels. The surveyors made a total of six loops covering all the adits, drifts and levels, including by boat in the case of those that were flooded. It took a total of two days to complete all the surveying with the handheld scanner, including planning and learning how to use the device. If a stationary scanner had been used instead, it would have taken considerably longer to complete the measurements – probably up to a week for a really large site. Ultimately, the surveying using the Zeb Horizon itself took a few hours, while the post-processing of the data in the GeoSLAM Hub + Draw software took several additional hours.
Point cloud processing
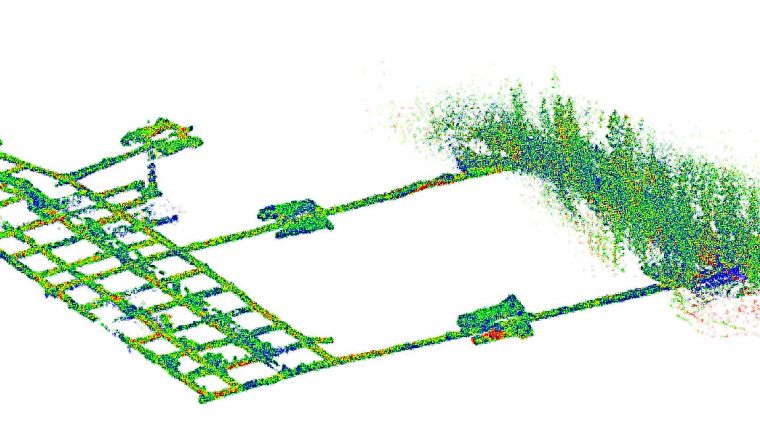
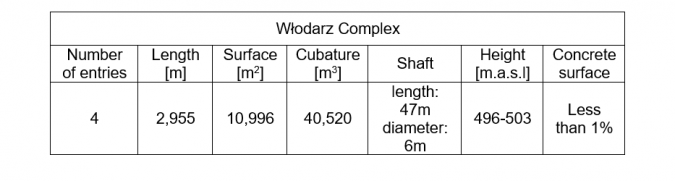
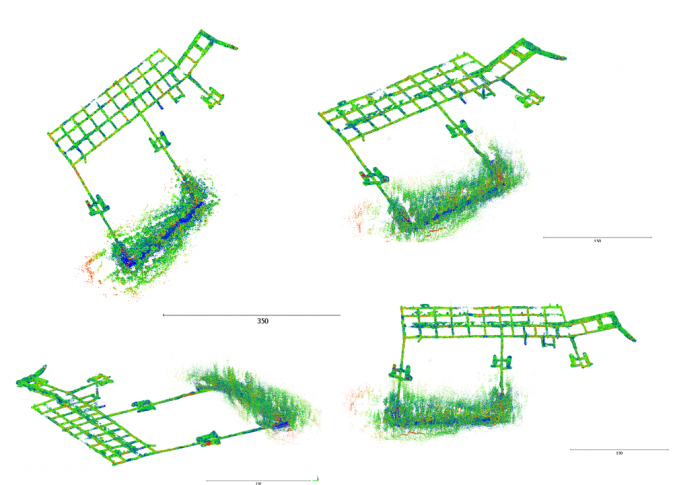
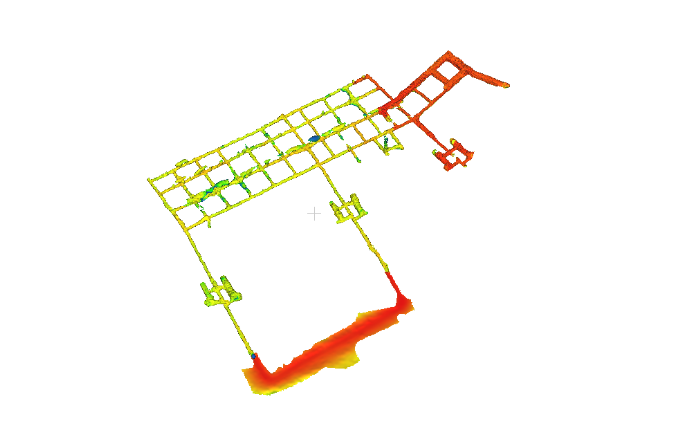
All the scans from GeoSLAM were post-processed in GeoSLAM Hub + Draw and then exported to .e57 format and visualized and analysed in Cloud Compare (see Figure 3). As the basis for further analysis, such as calculating the volume and area of a given complex, the triangular mesh model was created: a collection of vertices, edges and faces that defines the shape of an inventoried site (see Figure 4). All the information gained from the point cloud, mesh and its post-processing is shown in Table 1.
Conclusions
It is important to document architectural and archaeological history, and cultural heritage sites – and especially underground sites – require special treatment in terms of measuring, protecting and also spreading knowledge about them. Laser scanning, whether handheld or TLS, is a universal non-contact method which – combined with classic geodetic techniques – can be easily used in the inventory of underground sites. The resulting point clouds allow for the creation of spatial models and, after post-processing, support further computer analysis. Handheld scanners (including the GeoSLAM Zeb Horizon) reproduce drifts with sufficient accuracy for the preparation of documentation about underground cultural heritage sites. However, it is not recommended to use SLAM when highly accurate measurements are required (e.g. for deformation evaluation). More precise and detailed techniques such as TLS are needed for more accurate measurements and analysis. Nevertheless, SLAM geodata can be useful for professionals in many fields with a social purpose, such as historians, geophysicists, archaeologists and geologists, which emphasizes the interdisciplinary nature of this kind of research.
Further Reading
Hassani F., Documentation of cultural heritage techniques, potentials and constraints, The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-5/W7, 2015, 25th International CIPA Symposium 2015, 31 August – 4 September 2015, Taipei, Taiwan (2015)
Ochałek A., Jabłoński M., Lipecki T., Jaśkowski W., Methodology of historical underground objects inventory surveys–contribution, Geoinformatica Polonica (2018) doi: 10.5194/isprsarchives-XL-5-W7-207-2015

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















