Lidar Scanning by Helicopter in the USA
Capturing Levees, Riparian Boundaries and Railways
In recent years, use of unmanned aerial systems (UASs) has soared as a means for capturing geodata by images and Lidar. However, this does not mean that proven platforms, such as helicopters, have become obsolete. For various applications, Lidar scanning from manned choppers is versatile, quick, cost-effective and free of legal encumbrances. In this article, the authors elaborate on its effectiveness for 3D modelling of levees, riparian boundaries and railways.
Choppers are used ubiquitously to monitor rush-hour traffic and for search and rescue operations. Equipped with Lidar for collecting point clouds, they outperform mobile mapping by car and UAS in various settings. Choppers can access areas which cars cannot. Heavy winds and severe weather prevent most UASs from taking flight, as can legal restrictions. Helicopters can be flown legally anywhere in the USA, enjoy a wide community of pilots, and are quite affordable. Compared to a light fixed-wing aircraft they are more economical plus they can hover over an area of interest and capture data from different angles, which for a fixed-wing is almost impossible due to the fixed, directional flight path. Table 1 shows the main features of the Robinson R44 and MD 500 choppers used by the authors for Lidar geodata acquisition.
|
|
Robinson R44 |
MD 500 |
|
Max. payload [kg] |
340 |
664 |
|
Max. stay in air [h] |
> 3 |
> 3 |
|
Max. speed [km/h] |
200 |
282 |
|
Max. height above ground [m] |
4300 |
4875 |
|
Propulsion |
GAS 100LL |
GAS 100LL |
|
Rotor diameter [m] |
10.1 |
8.03 |
|
Height |
3.3 |
2.48 |
Table 1, Main helicopter features.
Lidar systems
Lidar is used to detect and measure the distances to surfaces by means of laser beams. Most airborne Lidar sensors use single beam to bridge the ranges from the aircraft flying at high altitude and the terrain. While the data yielded by these systems is quite good, the expense can be prohibitive. For mobile mapping Velodyne offers two 360-degree scanning systems: the HDL-32E featuring 32 beams/channels with 700,000 points per second, and the newer, smaller VLP-16 Lidar Puck featuring 16 beams/channels with 300,000 points per second. The lasers are similar in terms of the other main features: the wavelength is 905nm, pulse length is smaller than 10ns, two echoes per pulse are recorded, the maximum range is 75m, and the intensity of the return is recorded with 8 bits. Both use NovAtel STIM as GNSS/INS system, APM as mission planning software and ScanLook as post-processing software.
Levees
Levees are captured with either airborne Lidar or by ground survey. Aerial mapping enables large areas to be captured in one go but the level of detail may be too low. Ground surveys involve much equipment and personnel who may be confronted with unstable terrain and other dangers as well as obstacles like fences and walls. Although time-intensive, the measurements are very accurate at the few points where data is collected. However, there may be a need to revisit areas where no data was captured. During two days, two crews surveyed just 1.5km of the winding levee which has a length of 24km. Mounting the ScanLook Snoopy took under 30 minutes with nothing more than a screwdriver – specialised clamps similar to a vice grip could reduce the time needed. The levees were captured at a speed of 30 to 80km/h with up to 90-degree turns and vertical movements to avoid collision with tall utility structures. Capturing at low water level ensured coverage of the actual water basin, but there was still considerable vegetation with tall grass and brush. Cross-sections and points on roadways and bridges were used as ground control points (GCPs). The nature of laser spread allowed the capture of abundant points to create a bare-earth digital elevation model (DEM) with a height accuracy of a few centimetres, which was used in a hydraulic study.
Riparian boundaries
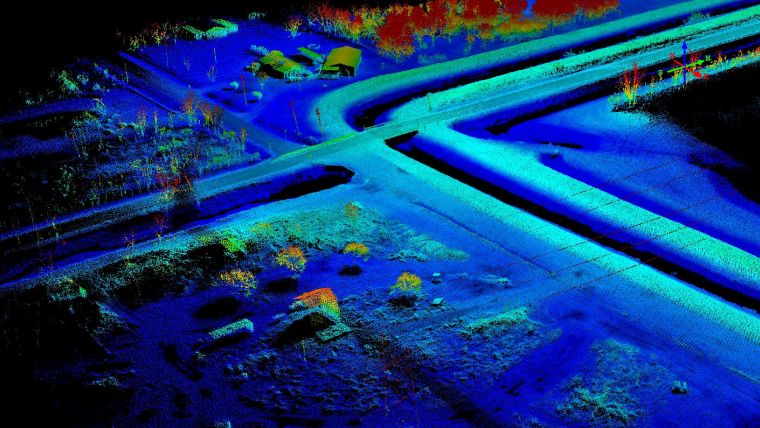
In swamps and lowlands and along rivers, lakes and other water bodies, property boundaries are often defined by a contour line. Localisation of the contour line is necessary for maintenance of the shoreline, to provide public access to areas otherwise impassable or to identify possible encroachment by adjacent owners that would hinder or endanger the general public. These environments are generally hostile to human passage. Using swamp buggies or boats, or going on foot, is intrusive plus it would take weeks and is thus expensive. The ScanLook Snoopy, mounted on a Robinson R44, captured an area of 3 x 2.7km2 of shallow water interspersed by land masses along parallel lines with 50% overlap. At an altitude of 60m and a speed of between 55 and 65km/h the area was covered in one hour. GCPs were used on hard surfaces around the area and along walkable trails. The legal contour line was generated from the bare-earth DEM.
Railways
Railway lines and rights of way are usually scanned from a railway wagon or a hyrail (hybrid vehicle/railway wagon). Rail travel is subject to exacting government safety regulations which hampers a smooth workflow; it can take hours to capture a few kilometres. Scanning from the air avoids such holdups and enables the capture of ditches and areas behind fences, buildings and other difficult areas. The duration of the survey can easily be predicted as it is determined by the length of the railway line, number of strips and speed of the helicopter.
Jeff Fagerman, PLS, has a surveying degree and a graduate degree in photogrammetry. After leaving Intergraph in 1999 he founded LIDARUSA (Fagerman Technologies) in Somerville, Alabama, USA. He is CEO and owner.
Wolfgang Juchmann earned his PhD in laser spectroscopy of combustion flames and thin-film deposition plasmas from the University of Heidelberg, Germany. He is director of sales & marketing for Velodyne’s Lidar Division in Morgan Hill, California, USA.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















