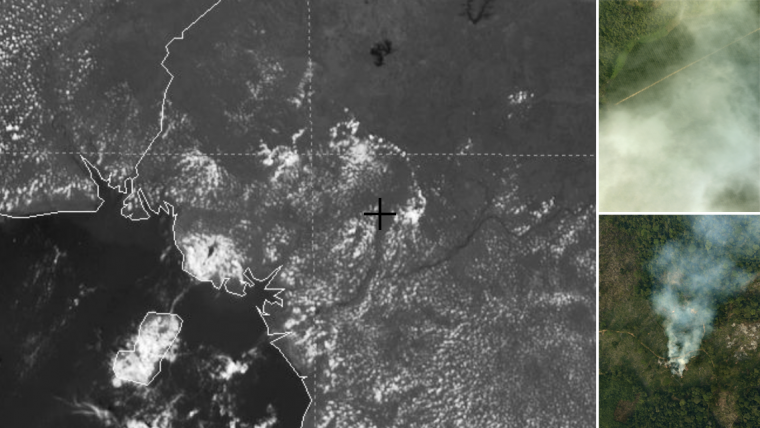
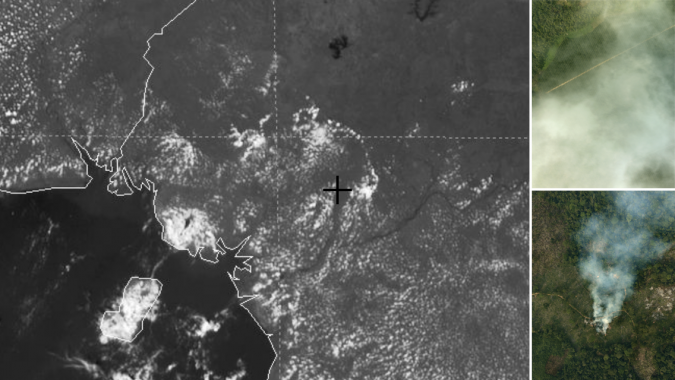
Lidar survey in cloudy conditions in Cameroon
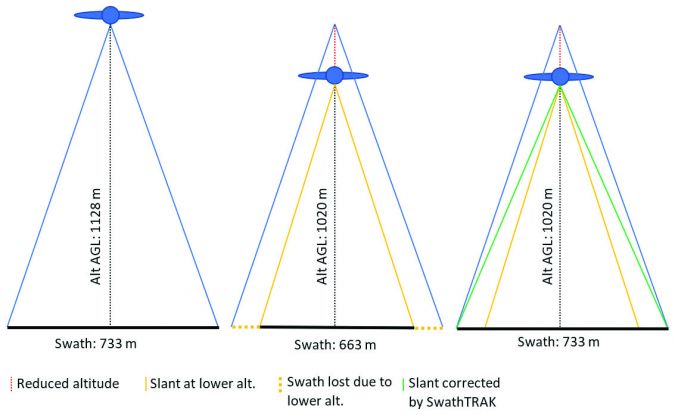
Dynamic field of view helps to maintain regular swath
A dynamic field of view feature was used to overcome the inability of Lidar laser beams to penetrate persistent cloud cover in this project in Cameroon.
In Lidar surveys, minimizing flight time is the key to minimizing costs. Operators therefore carefully optimize parameters such as flight altitude, field of view and pulse repetition frequency to cover the survey area at the desired point density with the fewest flight lines. One parameter that they cannot plan for, however, is the weather. This article outlines how a dynamic field of view feature was used in a project in Cameroon to overcome the inability of Lidar laser beams to penetrate the persistent cloud cover.
French survey company Société Topographie Informatique (STI) was contracted by the Communauté Urbaine de Douala (C.U.D.), a regional government body in Cameroon, to conduct Lidar and camera surveys for urban planning and floodplain management. Partially funded by Agence Française de Développement (AFD), the survey would cover a relatively wide expanse of 7,000km2, including Cameroon’s largest city and economic capital, Douala, plus areas with natural land cover and large dense forests.

Preparing for the survey
In the acquisition phase, close to 200 hours of survey flight time was planned over a period of two months in 2021. The STI team installed a Teledyne Optech Galaxy PRIME Lidar sensor and Phase One IXU-RS 1000 camera in a pressurized bi-turboprop Piper Cheyenne II XL aircraft and optimized the flight plans. While waiting for the right conditions to get the project underway, the team soon found out that the weather would be their greatest challenge. “The biggest problem we faced came in the form of low cloud cover that seemed to encompass the whole area,” said Bogdan Munceanu, STI project leader. Cameroon, located in the Gulf of Guinea in west-central Africa, is often described as ‘Africa in miniature’ because it has all the major climates and vegetation of the vast continent. Unfortunately for the team, Douala suffers heavy cloud cover for about nine months of the year. This is exacerbated by the humidity from the sea as well as haze, dust and perennial bush fires, resulting in constant low cloud cover over the city and its surrounding areas. This poses a problem because one of the limitations of Lidar is that the lasers cannot penetrate dense cloud cover and reach their target. Instead, the clouds ‘scramble’ the beam which prevents the target of interest (in this case the ground) from being mapped reliably.
Weathering the challenges
Realizing the clouds were not going away, Munceanu was quick to accept that he had to find a workaround for the problem. “With this survey we did not have the luxury to say that the skies are not looking so great this morning so let us fly in the afternoon,” he said. “If we were lucky, we may have got half an hour of clear skies on rare occasions, but for the most part it was heavy clouds all day, every day. We could have waited for months and still not seen a whole day without dense cloud cover.”
“Our plan was to fly at an altitude of around 3,000ft (914m) above ground level (AGL),” Munceanu continued. “We recognized early on that the presence of the clouds would not allow us to stick to our flight plan. Once in the air, we would have to adjust the altitude depending on the altitude of the cloud. I figured if we stayed at the base of the cloud with varying adjustments of on average 300ft below the 3,000ft mark, we would be able to achieve the necessary results.”

For traditional sensors with fixed field of view (FOV), reducing the flight altitude in this way would have been a major challenge because the swath on the ground would get narrower, potentially creating gaps between flight lines that could be a basis for the client to reject the survey data. Instead, the operator would need to compensate for the narrow swath by packing the flight lines closer together – resulting in more flight lines, more survey time and more cost. STI, however, had a better option. “What helped us immensely was the Teledyne Optech PRIME’s SwathTRAK feature,” said Munceanu. “This allowed us to keep a regular swath on the ground even when we varied from our flight plan.”
Dynamic field of view to the rescue
To keep the Lidar’s swath consistent, the feature constantly monitors the GNSS and IMU data to determine whether the aircraft is deviating from the flight plan. Such deviations can include both the aircraft’s position (too high, too low or too far to the side of the flight line) and its orientation (too much roll, pitch or crabbing). It also constantly monitors the range to the ground reported by the Lidar to determine whether the elevation of the ground itself is changing. By combining this position/orientation and ground elevation data, the feature can calculate whether these factors are distorting the swath on the ground and adjust the scanner’s FOV accordingly.
Teledyne Optech originally designed SwathTRAK for high-relief terrain, where it could increase the FOV when flying over hills and reduce the FOV when flying over valleys, thereby keeping the swath at a constant width and improving operational efficiency and data consistency. Over the years, however, the feature has been further developed to handle many other conditions such as corridor mapping applications.
In this case, STI realized that this solution could also compensate when the aircraft itself (not the ground) was changing elevation. Thus, when the aircraft had to fly lower due to clouds, the FOV was widened to keep the width of the swath on the ground steady and avoid gaps between flight lines (see Figure 4). Notably, despite the reduction in altitude from 1,128m to 1,020m AGL, the operator was still able to get the full swath of 733m as the FOV expanded to achieve the planned coverage.
Thanks to this flexibility, the STI team did not have to replan based on ever-changing weather conditions since they were guaranteed that the sensor would deliver the planned swath width and density even if they had to fly lower than planned.
Successful result despite the clouds
In practice, STI planned the surveys normally, setting the flight altitude to maximize productivity and cost efficiency, resulting in a 200-hour project. During each survey, the STI field crew (pilot and operator) adjusted their altitude to fly just below the cloud ceilings, relying on SwathTRAK to automatically compensate for the reduced altitude. That said, the operator did need to work within the hard limits of the technology during the flight planning phase. For this feature, the maximum scanner compensation is ±10° from the planned FOV, with a hard limit of ±30° from nadir (the Galaxy’s maximum FOV being 60°). For example, if the nominal FOV used is ±25° (a 50° full FOV), only ±5° is left for compensation. If the nominal FOV is ±20° (a 40° full FOV), the full ±10° can be utilized for compensation. Lastly, this solution only works for the Lidar, not the camera. Flying lower than planned still slightly decreased the footprint of the camera images on the ground, which could conceivably cause gaps between them. To avoid this, STI planned for plenty of sidelap between images.
On average, the cloud cover forced STI to fly about 380ft (120m) below the planned altitude, and as much as approx. 560ft (170m) lower on Douala’s cloudiest days. Without dynamic FOV, STI would have consistently lost up to 20% of flight lines every mission and would have spent a sizeable amount of time on replanning and post-processing to avoid/explain issues related to gaps and reduction in coverage rate. With dynamic FOV, the operator did not have to waste time remaking the flight plan each morning and the analyst was able to streamline the data, which was of consistent coverage and density.
Despite the challenges posed by the clouds, the team flew every planned flight while maintaining the desired point density and an average absolute accuracy of 8cm off of ground control. STI’s client, who had accompanied the team on one of the flights and was familiar with the challenges posed by the local weather conditions, was very happy when presented with the final results. According to the team’s own estimate, without the flexibility of using SwathTRAK it would have taken twice the time and effort to complete the project. Ultimately, the Galaxy PRIME’s built-in feature enabled the project to be completed on schedule and on budget, despite the cloudy conditions.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















