Mapping Dubrovnik and Split with integrated airborne sensor systems
Modern airborne remote sensing for complex city modelling
Integrated airborne sensing combining imagery and Lidar data presented an effective solution in this complex project to model two iconic Croatian cities with challenging relief and landscape.
Nowadays, both image-based solutions and laser-scanning methods are evolving rapidly, but there is much debate about which technology is more efficient. Integrated airborne sensors, in which imagery and Lidar data are complementary, can provide interesting new opportunities, especially in complex situations such as city mapping.
City planners require ever-more accurate, detailed and up-to-date geographical information. Whereas the high-resolution digital orthophoto was a big step forward to capture such detailed information 20 years ago, much more is needed today; a digital orthophoto alone is not sufficient. Eurosense recently had the opportunity to model two iconic Croatian cities: Dubrovnik and Split. In view of the project complexity, integrated airborne sensing combining imagery and Lidar data presented an effective solution.
Challenging geographical conditions
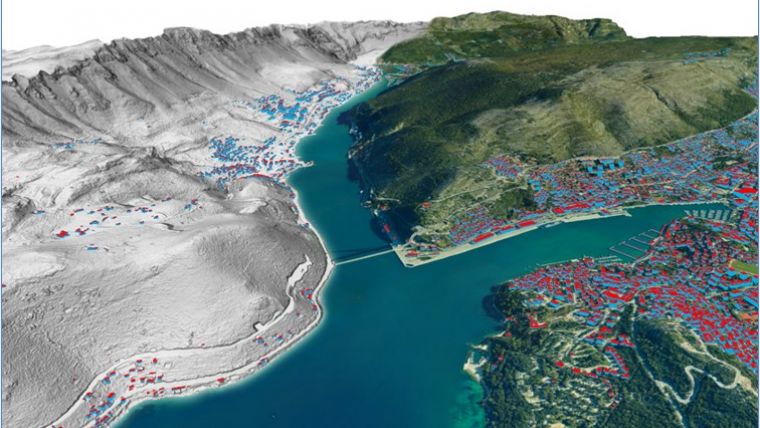
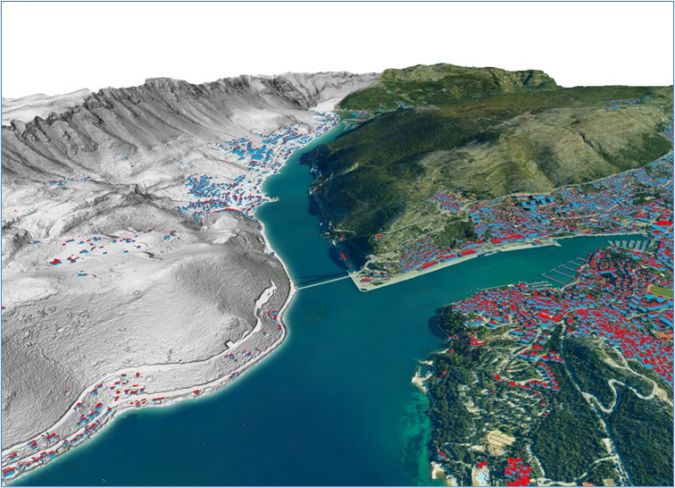
Both have very difficult relief and landscape. Local elevation differences in the areas of interest exceed 1,000m, including extremely steep and rocky shorelines. Landscapes are equally complex with very dense historical city centres, narrow streets and relatively high buildings. For example, in some dense and steep built-up areas, the elevation of the ground just 2-3m behind the building is often higher than the absolute elevation of the highest roof point of the building.
These projects were also made more complex by the large number of different products required by the clients. For example, for both cities it was necessary to produce high-resolution RGB stereo imagery, high-density Lidar data, a classified Lidar point cloud, an RGB orthophoto mosaic, Lidar DTM and DSM, and an LOD 2.2 building model. For Split, it was additionally necessary to produce a high-resolution true orthophoto, an LOD 2.2 building model in CityGML format and a 3D mesh model of the city centre.
Data acquisition and sensors
Proper selection of sensing equipment is crucial to the successful acquisition of scan data and imagery of such demanding areas. The detailed digital representation of dense urban space requires high-resolution and accurate scan data, with the particular necessity of being able to scan narrow street canyons with a minimum of shadowing and the capability of scanning vertical facades. The decision was made in favour of the RIEGL VQ-1560II and the VQ-1560i-DW – laser scanning systems of the latest generation featuring full waveform digitization and online waveform processing. Both systems operate a dual laser channel design, enabling forward/nadir/backward-looking capabilities with highly homogeneous point density distribution, which has proven advantageous in urban scanning. The two laser channels of the VQ-1560II operate at the infrared wavelength of 1,064nm, whereas the VQ-1560i-DW is a dual-wavelength instrument, with one channel operating at 1,064nm and the second channel operating at 532nm, i.e. green laser light. A mandatory high-grade inertial navigation system, a flight management system and up to two digital cameras complete the systems.
For the Dubrovnik area, the VQ-1560i-DW sensor was used with an integrated mid-format 100MP RGB PhaseOne camera. Images were captured at AGL=1,033 with a ground sample distance (GSD) of 10cm, and the average point density of the laser scan data was 24.5 points/m2.
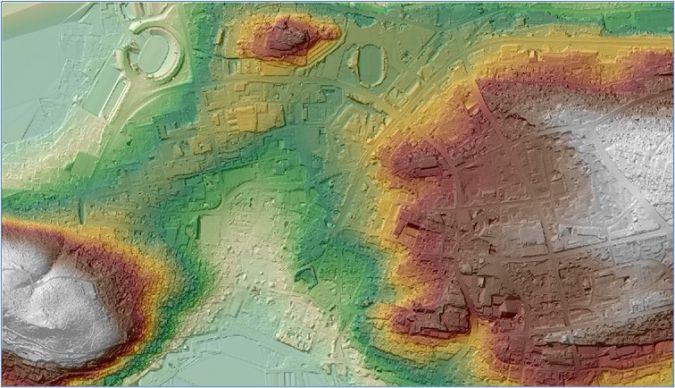
For the area of Split, Eurosense used its own aircraft and own VQ-1560II sensor with integrated mid-format 150MP RGB PhaseOne camera, flown at an altitude of 1,330m AGL, with an image GSD of 10cm. Due to the 80% side overlap, the average point density over the city was more than 90 points/m2. This high point density produced a robust Lidar database as the basis to build a precise digital terrain model (DTM) and digital surface model (DSM) and to execute reliable classification into 12 classes for both cities. The DTM and DSM were produced with 0.5m resolution in ESRI grid.
Special technical solutions
Several special technical solutions were used to overcome the challenges that arose from the complexity of the landscape and the difficulty level of the projects: high- precision aerial triangulation, LOD 2.2 buildings, a true orthophoto and a 3D mesh model.
- High-precision aerial triangulation
One of the technical challenges was to achieve a high precision vector building model by stereophotogrammetric extraction using mid-format camera images. Therefore, special attention was given to the accuracy of aerial triangulation during data processing. To get the required accuracy, recurrent self-calibration of the camera was performed and Lidar data was used in addition. Furthermore, the option of DTM was also applied in MATCH-AT which significantly increased the accuracy of the triangulation of PhaseOne images.
The triangulation block over the dense city area of Split consisted of 697 PhaseOne images.
In terms of the achieved accuracy, the root mean square error (RMSE) on 19 full (X,Y,Z) ground control points (GCPs) was RMSEX=RMSEY=±5.5cm, RMSEZ=±12.2cm. 39 check points were used to validate the achieved accuracy, giving the following result: RMSEX=±8.7cm RMSEY=±8.0cm, RMSEZ=±10.9cm. This accuracy is fully appropriate for precise 3D building vector extraction. To provide the most efficient use of PhaseOne images with their full triangulation result in different stereophotogrammetric applications, synthetic ‘undistorted’ images were also produced. - LOD 2.2 buildings
The densely built old city of Split with complex building roof structures presented a special challenge. More than 30,000 buildings were extracted. Besides the geometrical precision, another important aim was to create correct multilevel topology and object-oriented building database, whereby each building was a separate multi-polygon entity. All buildings fit perfectly with the DTM.


- Orthophoto/true orthophoto
In the technical specification of the project, a 10cm traditional orthophoto mosaic was requested.
Due to the challenging city structure, it was not possible to achieve acceptable quality of the traditional orthophoto mosaic, even with high image overlaps. Therefore, the project team decided to produce a true orthophoto. However, the result of the first trial did not achieve acceptable quality. The quality of the initial DSM was improved on the second attempt by using vector building data and dense Lidar data. With the improved DSM, the quality of the resulting true orthophoto mosaic was significantly better and fitted perfectly with the extracted building vectors.


- 3D mesh model of the city centre of Split
As the improved DSM resulted in a true orthophoto with much better quality, it was decided to produce a 3D mesh model of the city centre by using aerial triangulation results improved with additional involvement of Lidar data. Additionally, the complementary use of Lidar and vector data significantly improved the quality of the 3D mesh.

Uniqueness of the Dubrovnik project
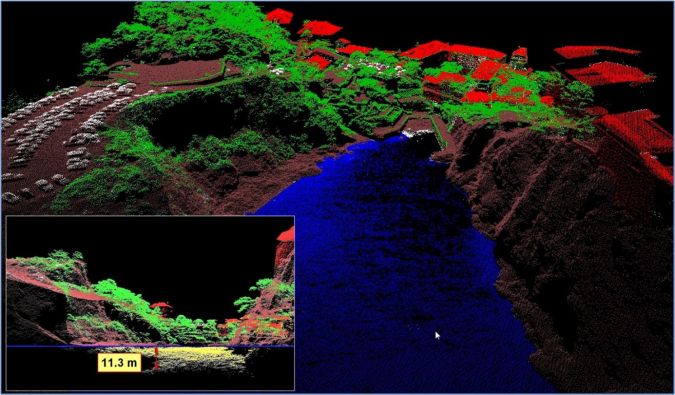
A unique feature of the Dubrovnik project was the use of the green channel of the RIEGL VQ-1560i-DW. While this instrument was primarily designed for collecting scan data of vegetation, this scanner has a unique capability to penetrate water and reach the seabed. This depends on the turbidity of the water, of course, but the crystal-clear water along the shores of Dubrovnik produced very promising results. Clear waters are quite common elsewhere in the Mediterranean and Adriatic regions, for example, so this technology could hold potential for larger-scale mapping of the seabed close to the shoreline. As an indication of the penetration depth of the green Lidar beam, this project flew at 1,033m above ground level and obtained returns from the seabed at more than 10m depth in some locations. However, this depth was not reached everywhere; generally speaking, penetration was much stronger near to the nadir and significantly less off nadir.
Conclusions
The first and general conclusion is that the use of both types of data – imagery and Lidar – allows increased accuracy and spatial resolution of the final products as well as faster and more cost-effective data services. Additionally, special technical solutions make it possible to obtain high geometrical accuracy from mid-format cameras. However, the questions remain whether the increased price of such additional efforts compared to the costs of using large-format photogrammetric frame cameras would justify the required quality level. Another conclusion is that the necessary high accuracy of aerial triangulation of PhaseOne images for vector mapping can be reached just using additional efforts like recurrent self-calibration and complementary use of Lidar data. In order to obtain a high-quality true orthophoto, special attention must be given to the improvement of the initial, automatically filtered DSM received from dense point matching. Moreover, the quality of the DSM is an important factor in the final quality of the true orthophoto and the quality of the 3D mesh model. Therefore, it is essential to have the correct and sufficient tools to improve the quality of the DSM by adding complementary constraints and to have an opportunity to edit the initial DSM. Lastly, the authors conclude that they have shown that, under certain conditions, with the correct flight planning and setup of the green channel of the RIEGL VQ-1560i-DW, this technology can be used successfully for underwater mapping down to depths of 10-12m in the Mediterranean and Adriatic Sea region. The precise conditions and constraints will require further investigation.
Acknowledgements
Eurosense executed the two Croatian projects presented in this article for GDi LLC. The primary users of the data are the cities of Dubrovnik and Split. OPEGIEKA (Poland) – as subcontractor of Eurosense – performed the flight over the city of Dubrovnik using its unique dual-wavelength laser scanning system, RIEGL VQ-1560i-DW.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















