Mobile Lidar Systems Today and Tomorrow
The Promising Future of Mobile Mapping and Laser Scanning
Mobile Lidar systems (MLSs) are used with increasing frequency for three-dimensional (3D) mapping applications along various corridors because of their extreme ease in capturing high-resolution 3D topographic data. This article examines the current state of the mobile Lidar system market before looking ahead to the future scope for mobile mapping and laser scanning, including potential challenges that lie ahead.
Mobile Lidar systems are frequently used for 3D mapping applications along various corridors because of their extreme ease in capturing comprehensive high-resolution 3D topographic data at normal speeds. An MLS observes a corridor and nearby objects in the form of their dense coordinates, leading to creation of a detailed 3D model of the corridor environment. Considering data quality and the completeness of the information captured by an MLS, it surpasses the traditional methods of data collection along corridors. Due to high accuracy and extensive information content in data, MLSs are being used along various corridors for topographic data collection, e.g. highways, railways, waterways, city streets, etc. The data is then used for solving various problems associated with these corridors, e.g. mapping roadside assets, assessing the condition of road surfaces, assessing road geometry, generating detailed project reports for widening of existing corridors, etc.
Advantages over traditional corridor survey methods
An MLS offers several advantages over traditional corridor survey methods, including high-speed data capture (time and cost reduction), high density of collected point cloud so no detail is missed, comprehensive topographic survey, minimisation of erroneous/questionable data, remote acquisition and measurement (increases survey efficiency and safety), and deliverables being coloured in the 3D point cloud for accurate representation of the objects in a scene. Widespread and frequent use of MLSs by various agencies has resulted in lower survey costs than with the traditional techniques, which is also a reason for its adoption as a mainstream surveying method for corridors, especially highways.
Existing mobile Lidar systems
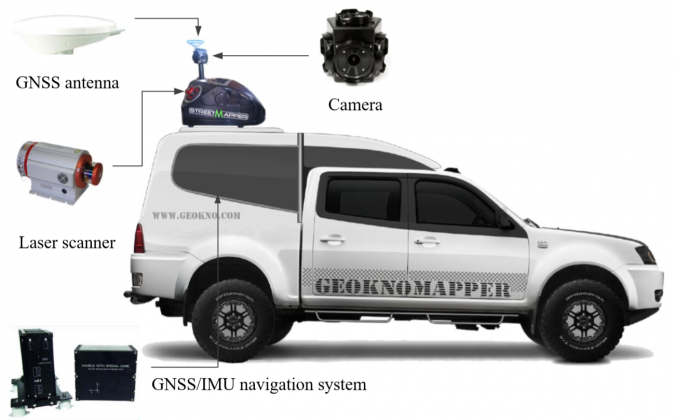
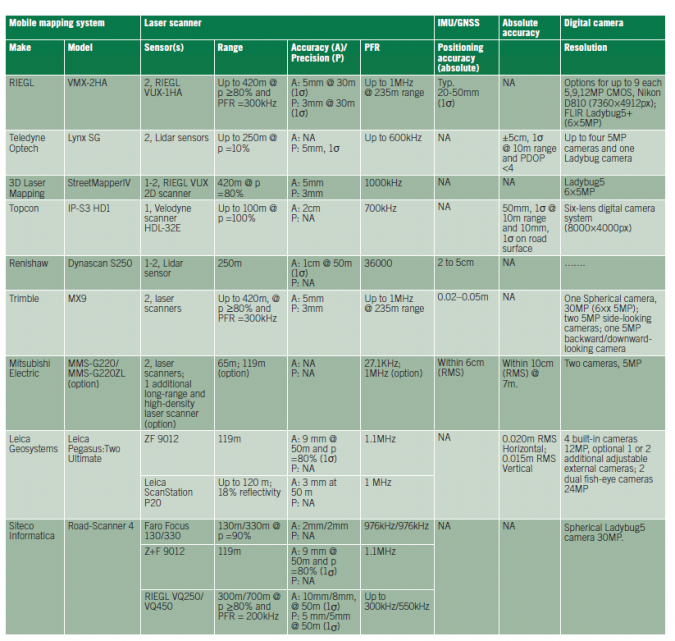
Over the past decade, numerous commercial MLSs have been developed by various manufacturers, e.g., RIEGL, Teledyne Optech, 3D Laser Mapping, Topcon, Renishaw (now Carlson Software), Trimble, Mitsubishi Electric, Leica Geosystems and Siteco Informatica. The latest multi-laser MLSs, such as the RIEGL VMX-2HA, StreetMapper IV, Trimble MX9 and Road-Scanner 4, offer more than 400 metres of roadside coverage. Laser range measurement accuracy to less than 6mm is mentioned in the datasheets of the RIEGL VMX-2HA, StreetMapper IV, Trimble MX9 and Leica Geosystems, while in the case of Lynx SG only range precision is given which is less than 6mm. Figure 1 shows a typical MLS and its components.
The orientation architecture of laser scanners is different in each MLS. For example, the RIEGL VMX-2HA, Lynx SG, StreetMapper IV, Dynascan S250, Trimble MX9 and Leica Pegasus:Two Ultimate are dual-head laser systems, while the IP-S3 HD1 and the MLS-G220ZL both have three laser heads and the Road-Scanner 4 is equipped with just one. Generally, these multi-laser-head MLSs are expensive (in excess of US$250 000), large in size and operator training is necessary. Table 1 shows a comparison of the commercially available and most commonly used systems.
Hardware and data processing
An MLS is an integrated assembly of ranging and imaging sensors with positioning and orientation systems. Rapidly advancing MLS hardware technology is improving the performance of MLSs. New, miniaturised sensor technology is leading to easier sensor integration and provides flexibility in mounting the sensors on different types of moving platforms. System miniaturisation opens up new avenues for more versatile and less expensive MLSs.
While the MLS hardware has improved multifold, the bottleneck in the adoption of technology has shifted from the data acquisition stage to the processing stage. The main problem in using MLSs is processing the vast quantity of data. Automation in feature extraction is only partially achieved, although researchers are continuously making efforts in this respect (Yadav et al. 2017 and 2018). MLS data processing for various applications is generally performed in three sequential steps: (1) removal of outliers, noise and unwanted information; (2) processing of filtered data for object extraction; and (3) modelling or generating a GIS database. Since the data acquired by an MLS is dense and volumetric, its processing demands intensive manual intervention. For example, a vehicle-based MLS operating at normal highway speed, e.g. 50km/h, can acquire around one gigabyte data for each kilometre, thus generating an excessive amount of data which may require one full week of processing on one work station.
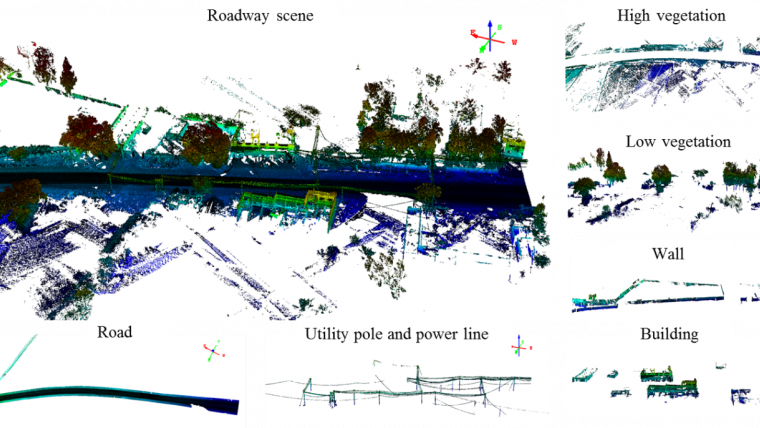
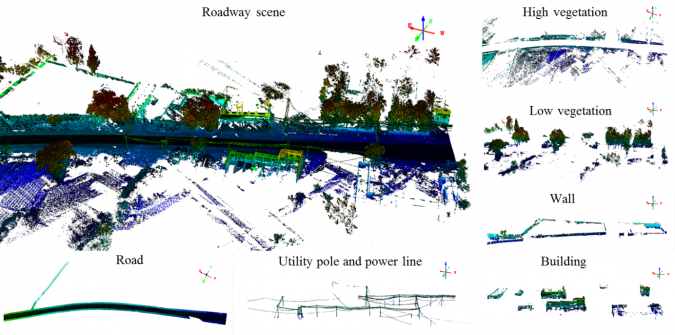
Keeping in mind these requirements, industry and academia are designing automatic data processing methods and software tools for accurate extraction of corridor information from MLS data. Automatic detection of corridor objects becomes difficult in the case of complex scenes and the unorganised nature of point data. Many semi-automatic methods are available for extraction of common features, e.g. in case of a highway, high and low vegetation, utility poles, power lines, wall and buildings. However, their applicability is limited to only well-structured and predictable MLS datasets.
Challenges and future scope
The fixed architecture of an MLS with a limited number of sensors and their fixed orientation on a rigid platform limits its performance as it does not provide the flexibility of operation which might be required for different applications. The available MLSs are often used on a specially designed platform, meaning that installation on a non-designated platform can be impractical, cumbersome and time-consuming. The laser pulses from side-looking laser scanners onboard an MLS generally hit a target at non-uniform spacing across the sensor path, which leads to different point densities across the area of interest. The viewing geometry of laser scanners is also responsible for data gaps due to occlusions. In dense traffic conditions on a highway, for example, the data acquired by a vehicle-based MLS is incomplete and several important pieces of information may be omitted due to occlusions. Currently such data gaps are partially avoided either by conducting the survey in quieter traffic conditions or by conducting multiple drives of the MLS, but this increases the survey costs. Due to the data gaps caused by non-uniform spacing, occlusions and complex scene geometry, automatic segmentation and classification of corridor objects become tedious tasks. Further, in order to generate good absolute accuracy of data, a large number of ground control points are required.
The miniaturisation of sensors helps to solve the problem of rigidity in the sensor integration and mounting architecture, but extensive work still needs to be done in terms of optimal application-oriented sensor layout design. The future may see new sensor integration architectures to facilitate easy installation and calibration on variable platforms so as to collect the data required for different applications. Plug-and-play system architecture would help operators in the field to design their own systems as per their requirements. The advances in multi-sensor integration will be seen in the near future for high-end mapping applications, where Lidar and visual simultaneous localisation and mapping concepts from robotics and computer vision technology can be used for image-based georeferencing. This will facilitate mobile 3D data capture and the updating of existing digital 3D realities using small, lightweight and inexpensive devices. Minimising manual intervention and designing automatic feature extraction techniques for 3D point clouds of complex corridor scenes is an important need. It will be interesting to see the developments in the use of deep learning for data classification (as in Kumar, et al., 2018).
References
- Kumar, B., Lohani, B., and Pandey, G., 2018, Development of deep learning architecture for automatic classification of outdoor mobile Lidar data. Accepted for publication in International Journal of Remote Sensing.
- Yadav, M., Lohani, B., Singh, A. K., Husain, A., 2016. Identification of pole-like structures from mobile Lidar data of complex road environment. International Journal of Remote Sensing 37(20), 4748-4777.
- Yadav, M., Singh, A. K., Lohani, B., 2017. Extraction of road surface from mobile Lidar data of complex road environment. International Journal of Remote Sensing 38(16), 4645-4672.
- Petrie, G., and Toth, C. K., 2018. Introduction to Laser Ranging, Profiling, and Scanning. Topographic Laser Ranging and Scanning: Principles and Processing, second edition, Shan, J., and Toth, C. K. (Eds.), Chapter 1. Boca Raton: CRC Press.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















