Multibeam Lidar for Mobile Mapping Systems
Features and Productivity
Various multibeam Lidar sensors are suited for mobile mapping. Read this article to learn more about their features and productivity.
In mobile mapping, geospatial data is acquired by one or more cameras and/or one or more Lidar sensors mounted on a vehicle that moves over land, through water or through the air. The distribution of Lidar beams over the scene may be realized by a spinning mirror or by a solid-state device. Multiple beams may be emitted simultaneously, and single or multiple returns may be captured.
Mobile Mapping Systems (MMS)
In the case of the selected Lidar sensors, the mechanisms for distributing emitted beams over the scene are based on either a spinning mirror or on solid-state technology. The mirrors may spin in an oscillating or rotating way. These spinning devices have moving mechanical parts which may introduce disturbances and malfunctioning, and thus affect the quality of the measured point cloud. Furthermore, calibration is continuously required, leading to higher surveying costs. Solid-state Lidar sensors have no mechanical parts, but the downside is a limited field of view (FoV) meaning that three, four or even more sensors are necessary to obtain full 360o coverage. When considering the features of Lidar sensors, operational aspects of the instrument and its measurement characteristics are important for mobile mapping. The main factors influencing the operational aspects are size, weight, power consumption and price. Measurement characteristics include maximum range, range accuracy, VFoV and point density – all of which should be high. Point density mainly depends on beam divergence, beam output rate and angular resolution. These measurement characteristics are discussed in more detail below.
Measurement Characteristics Lidar Scanning
Maximum range Lidar sensors mobile mapping
Manufacturers specify the maximum range at either 80% or 10% target reflectivity. For cars and other shiny objects, the reflectivity is about 80% resulting in longer maximum ranges. For pavements and other matt objects, the reflectivity is about 10% resulting in shorter maximum ranges. Given that most of the real-life targets have a low reflectivity rate, a longer Lidar scanning range is preferred. A long maximum range means better coverage, which is beneficial for mobile mapping applications.
Range accuracy Lidar sensors mobile mapping
Range accuracy usually varies from 2cm to 20cm with respect to the measured range. The higher the range accuracy, the higher the quality of the point cloud representation of road surfaces, road furniture, buildings, trees and other objects of interest will be. After emission, the laser beam diverges and propagates as a cone, resulting in an elliptical footprint when the beam hits a surface. Capturing small objects at longer distances from the vehicle requires small footprints.
Point density Lidar sensors mobile mapping
Point density is largely determined by the beam output rate, which is usually specified as points per second (pts/sec) emitted by the Lidar system. If the applications require high point densities, then the beam output rate is crucial. The smaller the angular resolution, which is usually specified for both vertical and horizontal directions, the denser the point cloud and thus the more detail is present. Usually, Lidar sensors capture the first and the strongest returns. These multi-return sensors result in denser point clouds and better object representations.

VFoV vertical field of view Lidar sensors mobile mapping
Most spinning Lidar sensors have horizontal field of view (HFoV) coverage of 360°. Solid-state systems require three or more aligned sensors to obtain full 360° coverage. On the other hand, the larger the VFoV, the better the scene is covered.
Specifications of Lidar Sensors per Manufacturer and Type
The features of Lidar sensors discussed above largely determine the survey productivity of a mobile mapping system (MMS). A selection of Lidar systems that are potentially suited for mobile mapping (see Table 1) have been categorized – based on the specifications given by the manufacturers – into four groups: very-high productivity, high productivity, adequate productivity and others. The specifications of the selected systems are listed in Table 1.
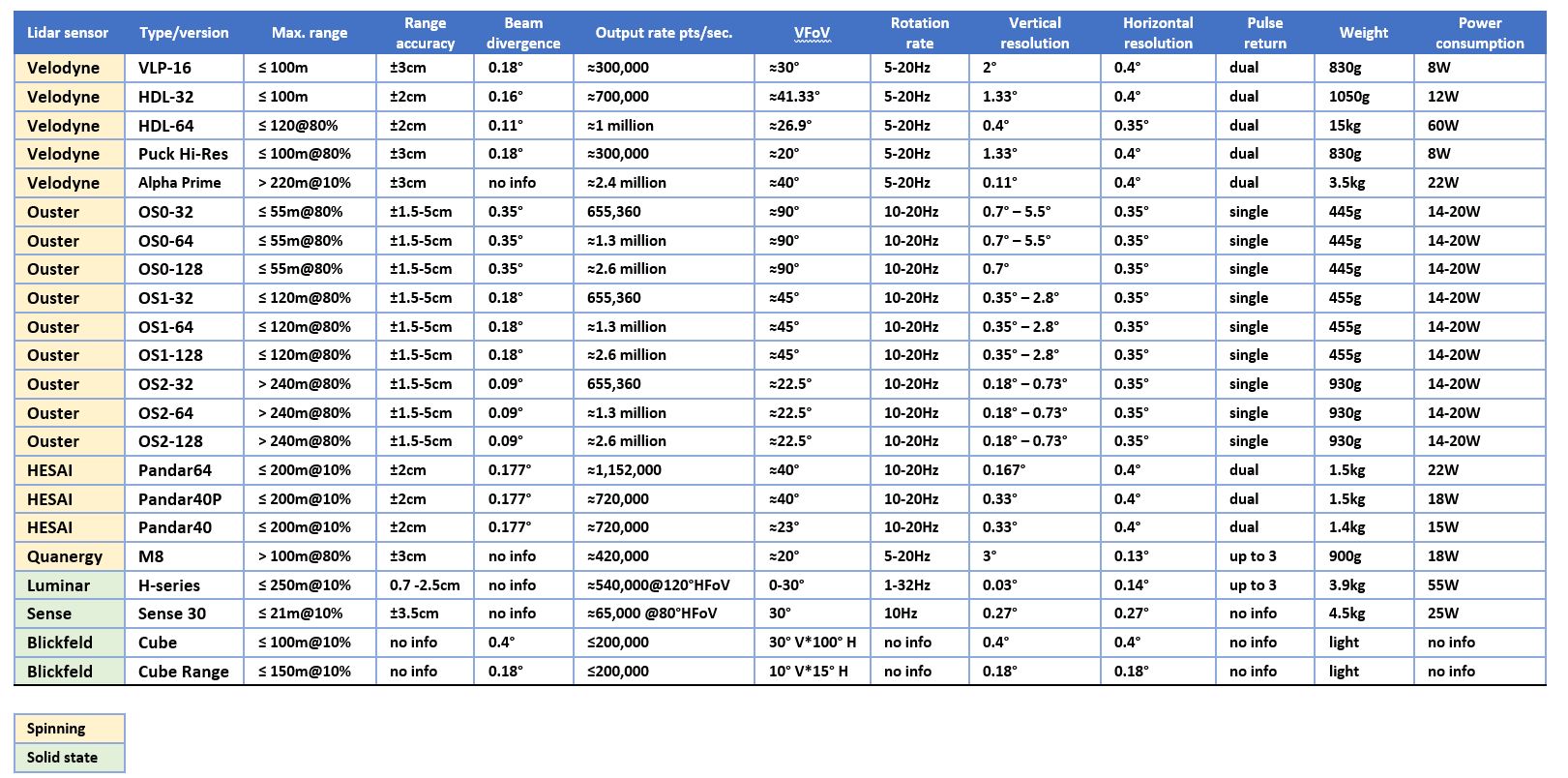
(Click here for a high-resolution version of the table)
Very-high Productivity (128 beams) Lidar Sensors
Three of the selected Lidar sensors have been placed in the top segment of very-high productivity. The main factor influencing productivity is the number of laser beams emitted simultaneously; currently, the maximum number of beams is 128.
With a total output rate of 2.6 million pts/sec for all 128 beams together, the Ouster OS1-128 has the highest output rate of all selected systems. Its price and VFoV of 45˚ give it the edge over the other types. The other very-high productivity Ouster Lidars OS0-128 and OS2-128 are less suitable for the mobile mapping applications because of either shorter scanning ranges or narrower VFoV.
With a total output rate of 2.4 million pts/sec for all the 128 beams together, the Velodyne Alpha Prime scores as one of the best spinning devices. Compared to other 128-beam sensors, this system has a wide VFoV, a high number of returns and a long maximum range. With respect to size and weight, the Alpha Prime is one of the largest and heaviest systems.
The solid-state Luminar has the longest maximum range and an output rate of over half a million pts/sec. Since three devices are needed to achieve a 360° VFoV, the total output rate is 1.5 million pts/sec. Weighing in at 3.9kg, the system is relatively heavy.
High Productivity (64 beams) Lidar Sensors
Four Lidar sensors have been categorized in this segment. Their productivity is lower because the number of laser beams emitted simultaneously is 64, which is half the number in the top segment. The spinning Ouster OS1-64 has an output rate of 1.3 million pts/sec and a maximum range of 120m. The beams are distributed symmetrically around the horizontal plane and the VFoV is good. As a result, this system has many beneficial properties – especially when two Lidar sensors are mounted on the vehicle.
The Ouster OS2-64 also has an output rate of 1.3 million pts/sec and its maximum range is 240m. The narrow VFoV and its larger size make it less suited for mobile mapping however. Both of these Ouster sensors are reasonably priced. Their beam wavelength of 850nm is less absorbed by water particles in the atmosphere, which means that both systems can operate efficiently under high humidity conditions.
Also in the high-productivity category are the Lidar systems from Chinese manufacturer Hesai. The maximum range of the Hesai Pandar64 is 200m at 10% reflectivity, the output rate is 1,152,000 pts/sec and the VFoV is 40° with a resolution of 0.17°. However, the three Hesai systems listed in Table 1 distribute the beams irregularly (gradient) over the scene; they are mostly concentrated in the horizontal plane. This may affect the coverage and uniformity of point distribution.
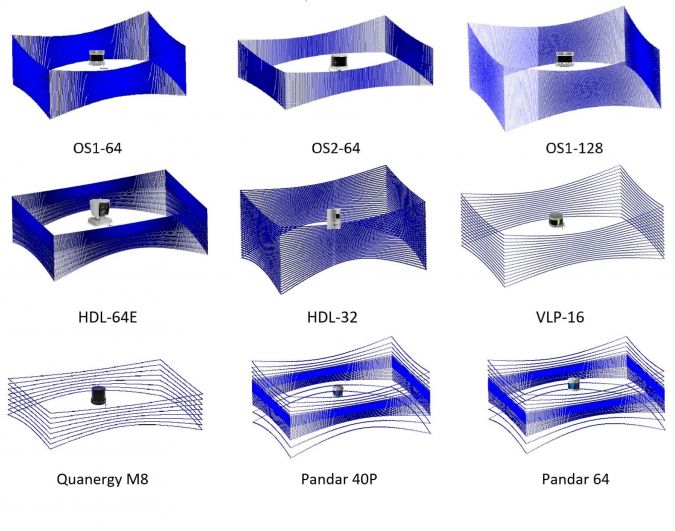
The Velodyne HDL-64E has a comparable output rate and the vertical resolution of 0.4° is reasonable. The disadvantages are its weight, size and price. Figure 2 shows the scanning patterns of different Lidar devices in a closed rectangular space where they are orientated vertically without tilt.
Adequate Productivity (32 beams) Lidar Sensors
Three Lidar sensors have been categorized in this segment. Their productivity is lower than the very-high and high-productivity segments because the number of laser beams emitted simultaneously is 32.
The Velodyne HDL-32 has a VFoV of 40˚ and a maximum range of 120m. It has a reasonable size, weight and power consumption and is used by mobile mapping companies such as CycloMedia, Topcon, Maverick Teledyne Optech and Viametris vMS3D (Figure 3).
The features of the recently released Ouster OS1-32 are comparable to those of the Velodyne HDL32, but with a slightly lower output rate. The symmetrical angles above/below the horizon of the OS1-32 are beneficial for capturing above and below-ground objects. Considering its reasonable price this multibeam Lidar is a popular choice, especially when multiple devices are mounted in the MMS.
Except for the number of laser beams emitted, the features of the Hesai Pandar40P are similar to the high-productivity Pandar64.

Others Lidar Sensors
There are several other Lidar sensors which may be particularly suited for indoor and unmanned aerial system (UAS) applications.
The Quanergy M8 has a small horizontal angular resolution, captures up to three returns per pulse, has a VFoV of 20° and emits eight beams simultaneously.
The Velodyne Puck sensors (VLP-16, Hi-Res, Lite) have output rates of 300,000 pts/sec. Their maximum range, range accuracy, size, weight, power consumption and prices are reasonable, but their geometric/scanning properties are less adequate than the HDL-32.
The features of the Hesai Pandar40 are similar to the Pandar40P but the VFoV of 23° is narrow. Mapping companies are using some of these Lidar sensors in their unmanned airborne systems and indoor mapping systems (Figure 4). For example, the Australian company Emesent has mounted the Velodyne VLP-16 on its Hovermap UAS (Figure 4a), and Viametris has mounted the VLP-16 (Figure 4b) on its backpack indoor mapping system.
The C2L nebula-LP MMS (Figure 4c) and the GeoCue UAS (Figure 4d) use Quanergy M8.
The maximum range of the Sense 30 – a solid-state sensor – is 21m, which is an impediment for outdoor applications.
The two Blickfeld solid-state sensors listed have a low output rate. The acquisition of dense point clouds requires thus long survey times.
The newly released ultra-wide-view Lidars from Ouster (namely OS0-32, OS0-64 and OS0-128) have a 90˚ VFoV which is highly efficient for autonomous driving. However, they are less relevant for mobile mapping applications because of their limited maximum scanning range of 20m @ 10% target reflectivity.

Concluding Remarks for Mobile Mapping Companies
Mobile mapping companies that want to conduct large-scale projects or achieve city-wide coverage may benefit from a single multibeam Lidar with high productivity or from integrating multiple Lidar devices from the very-high or high-productivity categories. Of course, the available budget will play a key role in the system choice. A wider VFoV combined with a longer scanning range, high output rate of points and better range accuracy will always be of significant importance when selecting the most suitable Lidar device for a mobile mapping system.
Author’s note: Lidar technology is rapidly evolving and new types are being released all the time. The information provided in this article was correct at the time of writing.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















