Point-cloud Preservation Plans
Saving China’s Cultural Heritage
The first step in the preservation of monuments and historic buildings is to completely survey and map the target; this is followed by digitised documentation for future research, reference or rebuild. With the help of point-cloud mapping and scanning technology, the problems of manual measurement and documentation can be solved fast and efficiently.
There are nearly 300,000 monuments and historic buildings rated in the ‘protection range’ in China; the preservation, rescue and rebuilding of these structures represents a substantial objective. The traditional hand-drawn architect’s diagram, close-range photography from the ground, and surveyor’s structural plans express key parts and overall structure of buildings. However, technical limitations complicate rapid mapping of ancient buildings and production of a clear representation of three-dimensional space. The subjective human imagination cannot deal in detail with an ancient building, and complete accurate mapping always takes place under existing conditions. So there is always a big gap between representation and true life. The use of point-cloud extraction of ancient buildings can, however, eradicate lack of detailed data. Rendered details become more natural and visually realistic.
3D Laser
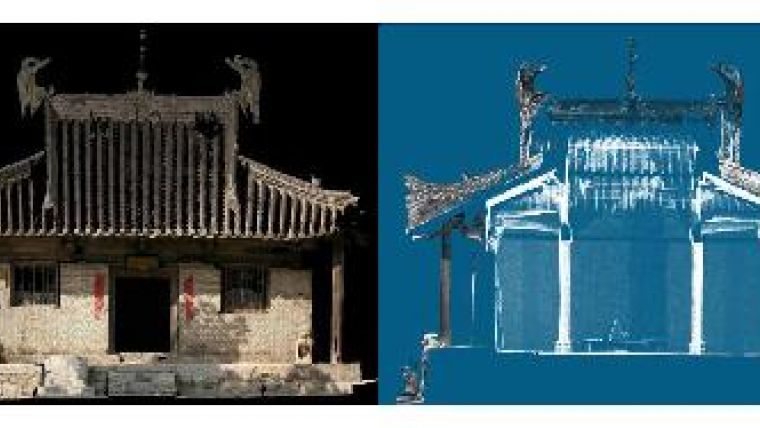
In addition to point-cloud data of the entire building, a 3D laser scanner is applied, in association with relevant computer programs to solve the problem of temple surface reconstruction in multi-dimensional imagery analysis. The generated image will provide a sense of immersion, truly exposing the spatial- temporal aspect of artistic detail to the audience. In addition, the method will provide the most accurate reference without actually subjecting any object to manipulation by surveying tools, thus avoiding potential damage to and impact on the historical monument.
kubitPointCloud software from was used to process the 3D laser-scanning data, relying on a powerful supporting program, AutoCAD, to solve the problems of measuring any blind zone. This combination of functions takes on a transitional role in protection work concerning monuments and historical buildings. The PointCloud program manipulates the model of the historical building, including detailed structures which would not easily be observed from the site. For example, the program allows users to study a topological model, and simulate and design reconstruction procedures. This can provide the basis for accurate and comprehensive structural analysis for renovation of historical buildings.
PointCloud
The first task is to define a coordinate system for a historic building. If the laser-scanner collecting data is working on uneven terrain or ground angled by the geographical situation, the collected point-cloud data will not match the software drawing coordinate system. So sampling of the 3D laser-scanner data and sampling of data points calculated for the surface-fit algorithm will result in a more accurate surface. The point-cloud data from the ancient building allows determination of floor level; other point-cloud data from the building allows horizontal floor level to be determined. This information allows the software to automatically calculate the user coordinate system (UCS).
The next job is to obtain an accurate drawing of the antique outline. Once the UCS is determined, the task arises of how to define the antique outline of building surface features. Again using the collected data point-cloud, two adjacent plans are fitted according to their intersection to attain a scientific and reliable line: the antique outline. Even if there is an error or blind zone in the instrument data, the technique outlined here will still render a realistic image of the antique object.
Spatial Structure
To georeference the 3D structure, the spatial information from the 3D laser-scanning information and photogrammetry is used. The point-cloud data is imported into the technical drawing together with the imagery. By connecting the control points of the drawing, imagery and 3D point-cloud the (internal and external) orientation of the camera can be calculated. The imagery can now be draped over the 3D point-cloud, resulting in a real-world object. The merging of these two kinds of dataset is the advantage of this new technology.
Experience
Chongqing is a famous mountain territory and many architectural structures were built on the hillsides in antiquity. The march of time, soil erosion and geological movement, including that of baseline level, has resulted in corresponding displacement. kubit PointCloud software allows us to define a plan using point-cloud data, and so acquire a more objective definition of the ground floor-plan of a building to provide an accurate basis for digital measurement. Due to the complexity of Chinese vernacular and traditional architecture, a comprehensive view of a building requires denser point-cloud data than is usually needed for other applications. Detailed scanning is recommended, particularly if detailed information is needed from the same scan position. This allows smaller features of the ancient building to be modelled more accurately too. It is also better to avoid scanning glazed tiles on ancient buildings; the data quality of the point-cloud will be degraded by intense sunshine on glass tiles. By using the 3D cartographic function for this data we can combine registered onsite imagery for manual mapping, so reducing any deviation introduced by the scanned data.
Concluding Remarks
3D laser scanning provides an innovative way forward in the field of historical building research and protection. Post-processing software is the essential basis for the success of hardware technology. Point-cloud data allows the precise and efficient drawing of facade plans, sections, elevations and isolines, so that an engineer can provide an accurate and persuasive guarantee of preservation efforts.
Acknowledgements
Thanks are due to Kubit GmbH and all the staff.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















