Point Clouds (2)
Survey of Processing Software
Collecting and processing point clouds has been trending topic in the geospatial sector over the past few years. This article focuses on point cloud processing software aimed at creating DEMs or DSMs and products derived from these. The first article of this diptych, originally published in the June 2014 issue of GIM International, focused on functionalities.
This survey starts with the software of Terrasolid, which is based in Helsinki, Finland. It will then focus on three systems listed on the Geo-matching.com website, subsequently continuing with software which operates independently from the particular sensors, to then arrive at proprietary systems. It will end with packages aimed at sonar echoes. Hopefully, this article will encourage vendors to upload the specs of their packages onto Geo‑matching.com.
Terrasolid
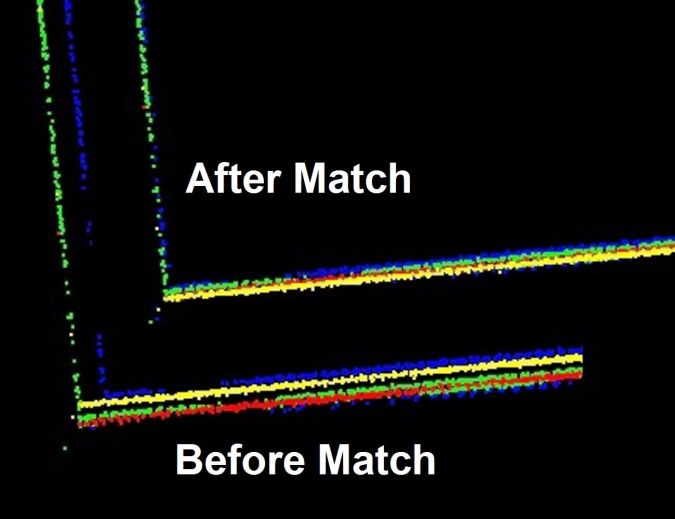
We start our survey with Terrasolid, who develops modules aimed at processing Lidar and image data captured from airborne sensors and mobile mapping systems (MMS). It may be readily stated that the modules together form the most complete set for the processing and analysis of Lidar point clouds. The suite consists of 5 main modules: TerraModeler, TerraScan, TerraPhoto, TerraMatch and TerraSurvey. In addition to visualisation options such as coloured, shaded surfaces TerraModeler creates TINs (Triangular Irregular Networks) and products derived from these such as contour lines and profiles. The software also calculates volumes and volume differences between two models. The main module is TerraScan. Filtering and 3D vector data extraction can be conducted fully automatically including the creation of building models up to Level of Detail (LoD) 2 and vectorisation of power-line wires. The results can be visually checked and manually modified to enhance and extend the models. The results of TerraMatch, a module which runs together with TerraScan, may appear to be humdrum to the visually oriented user. However, its operations are key as they adjust for the geometric differences which may be present in the diverse scans due to drift or other sources and hence are decisive for the quality of any end product. To detect the differences, the software automatically matches patches or tie lines in the overlap of scans and thus corrects for shifts and misalignment (Figure 1). Added to this, the software has calibration facilities. TerraPhoto creates orthomosaics from images using a Lidar digital surface model (DSM) captured at the same time. The orthomosaic can be draped over the DSM or over the roofs of 3D building models while textures from terrestrial (mobile) images can be projected onto building facades. The software enables fly-through animations and image colour to be assigned to Lidar points. TerraSurvey handles total station and GNSS data. ‘Lite’ versions of all 5 modules serve users who do not need all the functions. A sequence of modules creates a customised workflow in a single software environment. Most modules run with Bentley software.
Geo-matching.com
At the time of writing – mid-May 2014 – three vendors had listed the specs of their packages on Geo‑matching.com: Pix4D, Adtollo and Maptek. The Pix4D software is to aerial images what Terrasolid software is to Lidar. The young Switzerland-based company aims at obtaining orthomosaics and DSMs automatically from any aerial camera, whether nadir oriented, oblique or mounted in an unmanned aerial system (UAS). The tools enable fully automatic calculation of interior and exterior orientation by bundle block adjustment, generation of DSMs and orthomosaics and products derived from these. The core consists of image-matching modules which compute, from the contrast in a patch around a pixel, features which are then matched with candidate points in the overlaps. The very dense cloud is then filtered and interpolated leading to DSMs from which volumes and other products can be derived. The software supports a wide range of uses with an emphasis on mapping of open-pit mines, quarries and pits. Topocad from Adtollo – based in Stockholm, Sweden – is a CAD system made for surveying, mapping, design and GIS. Over its two decades of existence it has evolved into a modular system bringing field survey data to designs and maps. The Base module creates DSMs, contour lines and cross sections from a variety of data sources including airborne Lidar, terrestrial laser scanners (TLSs) and imagery. Added to this, it calculates volumes and other products. Meanwhile, users who are involved in exploring remote areas can benefit from the Maptek I-Site Studio. This package has been designed for modelling the natural Earth and supports mining and other uses. It exploits Windows 64-bit computing, which supports processing of hundreds of scans and millions of points in one run. Contours can be generated fast and exported as DXf, DXB or DWG strings while 3D models can be easily exported as CAD wireframes, string files or solid surfaces. The clouds are generated by TLSs or MMSs. Other packages from Maptek are Topo, Geotechnical, Void and Forensic. The latter is designed for analysing crime scenes or crash sites (see Figure 2) captured by the laser scanners from I-Site, Z+F 5006 and FARO and the handhelds from Mantis from Israel (Figure 3).
Sensor-type Independent
Point Cloud from Carlson aims at processing clouds from a wide variety of TLSs. Up to one billion points can be input and triangular irregular networks (TINs), contour lines, profiles, sections and break lines automatically computed. 3D models of poles, trees and hydrants can be extracted, and filtering allows vegetation and man-made objects to be removed. In contrast to this general-purpose software, EdgeWise Plant from Clearedge3D is dedicated to 3D modelling of man-made objects such as chemical plants, oil refineries and overhead power lines. Pipes, elbows, valves, flanges and other parts can be automatically extracted which reduces the manual workload; clients report savings of over 75%. The results can be manually verified and poor fits can be refitted. Another type of software mainly used in industry, manufacturing and reverse engineering is PolyWorks from InnovMetric, Canada. Modules for merging, georeferencing, measuring and editing can be combined with compressing and texturing modules into one package. Other packages focus on the use in construction and land management, such as Pythagoras. This company, founded in January 2011, is a vendor of CAD and GIS software for land management, surveying, road design and civil engineering. Its DSM module processes millions of 3D points stemming from UASs and other sources, and it creates profiles, cross sections at specified intervals in masked areas and contour lines at selected intervals. Volumes can be calculated as well as cut and fill amounts for earthworks. VirtualGrid produces packages each aimed at a specific type of user. VRMesh focuses on automatic extraction of vegetation, buildings and ground points from airborne and MMS point clouds produced from Lidar and/or aerial images, with the survey module focusing on airborne Lidar and MMS. Some vendors hoist ease and high speed in the zenith, such as Germany-based PointCab who focuses on TLS users. The software has been on the market for four years and is composed of a dozen modules. There are, for example, individual models for volume calculation, for creating plans from digitising the point cloud, and for extracting and creating correctly positioned 3D points and exporting them in a CAD system.

Proprietary Software
Manufacturers of sensors often also offer software for managing and processing the sensor outputs. Here we will consider the systems from Faro, Leica, Riegl, Optech and Trimble. Scene 3D, designed for managing and processing the Faro Focus3D sensor outputs, allows seamless stitching of overlaps to a single point cloud without the need to place markers. This facility is enabled through automatic detection of corners, edges and other structures for use as tie points. Stereoscopic viewing enhances the detailed analysis of parts of the point cloud, which can also be quickly colourised. The software supports the ASTM E57 binary data exchange standard for 3D data. Projects can be published on a web server using the WebShare Cloud module for sharing with project partners. Cyclone processes the outputs of Leica TLSs and consists of several modules. The Model module enables clouds of industrial sites and the like to be processed into objects such as pipes for use in CAD, and a subset of this module – Survey – facilitates extraction of features and coordinates. To support users of TLSs from Faro, Riegl and Optech, the Importer module allows output to be converted to Cyclone-accessible formats. Modules for controlling and georeferencing scans can be integrated with modelling modules into one package. With respect to airborne Lidar, Leica software transfers the raw data of its family of ALS airborne Lidar systems to point clouds which are georeferenced in WGS84, and the ASCII output is compatible with a variety of TIN/contouring software packages such as the abovementioned TerraModeller. With respect to TLSs, Trimble focuses on the oil and gas industry, industrial facilities, civil engineering, architecture, preservation and law enforcement. The latter centres around the reconstruction of collision or crime scenes. Trimble’s RealWorks enables as-built data collected from the TX5 3D laser scanner to be registered, visualised, explored and manipulated. Pipes can be modelled using the EasyPipe module and the output can be imported into CAD/BIM packages. Inpho’s LPMaster has been designed for use with the Trimble Harrier and AX60 airborne Lidar system and is fully integrated into the Inpho software line. Optech’s airborne Lidar, MMS and TLS are compatible with proprietary software for survey planning, navigation and control and for processing the output. ALTM and Lynx LMS Pro software produces rectified and georeferenced LAS (XYZi) data. The data may be collected with various GNSS receivers at different times. FMS, designed for the Orion and Pegasus ALTMs and the Lynx MMSs, handles flight planning, multiple sensor system control and monitoring, and navigation. LMS processes the point clouds and outputs them in LAS and ASCII files. ILRIS Scan is a single package, from scanning to processing, and can be used with minimal training. Riegl offers packages for acquiring, managing and visualising the raw outputs of its TLS, airborne Lidar and MMS systems. The modules also provide a variety of functions for data processing. The resulting data can be transferred to third-party software for further processing and analysis. Riscan Pro aims at the output from the firm’s TLS systems. Scans, digital images, GNSS data, coordinates of ground control points (GCPs) and tie points acquired during a campaign and all matrices for transforming scans into one coordinate system are organised and stored in one project structure. The XML file structure gives access to all project information. The software allows visual inspection and elementary data processing. Fully automatic registration can be done with Risolve. RiMINING is designed for modelling open-pit mines. No marks have to be placed as georeferencing is done automatically through the GNSS, compass and inclination sensors built into the TLS systems. Vegetation, objects or outliers can be automatically removed while break lines can be detected and volumes calculated. Exchange with mining software is supported. Sensor outputs from the firm’s airborne Lidar and MMSs can be managed and visualised by RiPROCESS. Full waveform airborne Lidar data can be processed by RiANALYZE by making the data compatible with airborne Lidar processing packages.

Bathymetric Packages
The packages discussed above centre on point clouds of the land surface. But there are also a multitude of packages for processing echosoundings for mapping riverbeds and seabeds. Some packages take an intermediate position as they process both land and sea data. One such suite is Bathy DataBASE, made by Canada-based Caris, which is specialised in software for marine, land and aviation applications. The suite focuses on sonar and Lidar data and is composed of 5 modules, together covering a range of operations from visualising, validating, analysing and generating smoothed contours to server tools for sharing data via the web. Differences in coordinate systems can be bridged so that land and seabed DEMs can be seamlessly fused. Other packages support input from a wide range of sonars. For example, NaviSuite, from Denmark-based Eiva – a provider of equipment and software for subsea applications – covers the workflow from data capture by a range of sonar systems as broad as sidescan sonars, scanning and profiling sonars and multibeam echosounders, up to professional paper-chart production through 5 modules. The features of the high-end tools enable real-time monitoring of vessels, subsea objects and constructions; real-time generation of DEMs; point cloud stitching; data editing with graphical tools; and calculation of area, volume and profiles, plus many more functionalities. The software serves a wide spectrum of marine applications including the offshore oil, gas and wind-power industry, oceanography and hydrography. Other firms aim at serving specific types of user. For example, Geocap, headquartered in Norway, provides mapping and modelling software to geoscientists in the form of 5 application-oriented modules. The seafloor module creates DEMs from multibeam echosounders. As data without quality description is of little to no value, the firm has made available CUBE (Combined Uncertainty and Bathymetric Estimator), developed by University of New Hampshire, USA. CUBE not only allows depth data to be generated but also a confidence interval to be assigned to each point. Another package that supports CUBE data processing is from Hypack. Founded in 1984 and today with more than 4,000 users of its software, the firm offers hydrographic software for designing surveys, collecting and processing data and creating end products. The 3 modules offered allow real-time 3D terrain modelling to create TINs and to calculate volumes; and graphical and automated editing.
Concluding Remarks
In my column Background to Point Cloud Software I give some notions which may further help the reader to categorise the broad pallet of point cloud processing packages and so to gain greater insight into the peculiarities of each of the modules treated above.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















