Spectral Imaging Cameras: A Review of Key Specifications
Going beyond the three visible bands and limited spectral range available in conventional digital cameras opens up a wealth of new possibilities for identification, mapping and measurement of surface and material properties. The application of spectral imaging is currently seeing increased interest across multiple disciplines and application areas, including quality control in industrial applications, agriculture, geological and environmental or urban mapping, to name but a few.
The market is rapidly expanding and comprises of an increasing range of vendors and camera models. Consequently, surveying and mapping professionals new to this field may struggle to gain an overview of the main considerations when assessing the pros and cons of available equipment suitable for their own applications. This article attempts to shed light on the main specifications to consider when choosing a spectral camera. We focus on a selection of properties that set spectral imagers apart from conventional photographic cameras with emphasis on the visible to thermal infrared wavelength. As spectral imaging is based on physical laws and relationships, measuring surface energy as a function of material and wavelength, special considerations for spectral cameras apply.
General camera design
For spectral imagers a few key features are significant when choosing cameras for specific applications. While multispectral cameras provide only a few (typically <10) relatively broad spectral bands, hyperspectral cameras are characterised by a higher number (often >100) of narrow spectral bands, resulting in near-continuous spectral curves, which allow even minor material differences to be distinguished.
Both frame cameras and line sensors are common in spectral imaging, each giving significant differences in image acquisition and resulting image geometry, as well as potential optical aberration and misalignments effects. Due to the high number of bands, hyperspectral imagers are often designed as line (pushbroom) sensors, which require movement either of the one-dimensional sensor line, or of the scanning objects to obtain an image. Recent developments have seen the introduction of frame hyperspectral imagers, though these are currently limited to lower spectral resolution and to the visible and near infrared spectral range. Hyperspectral line sensors acquire spectral bands simultaneously for all pixels within the sensor line, resulting in a time offset between image lines. In contrast, hyperspectral frame cameras acquire, band-wise, all pixels of the 2D array simultaneously, resulting in a time offset between the bands. Consequently for many spectral imagers, the image acquisition time is not only related to the exposure.
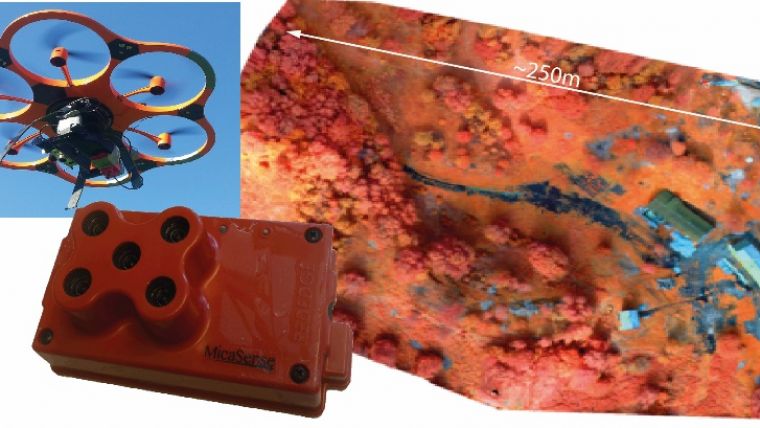
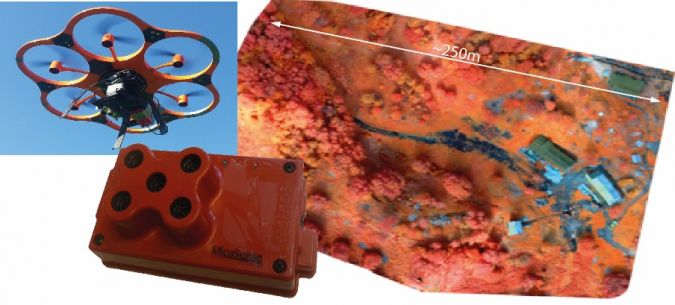
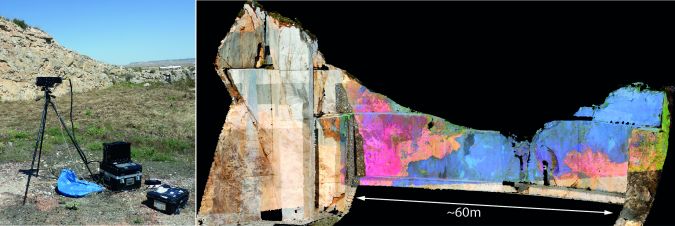
As with other imaging and 3D measurement devices, size, weight and energy consumption can be crucial, such as for use on UAV platforms. Lightweight UAV-ready multispectral cameras are becoming increasingly common. Hyperspectral imagers suitable for UAV mounting are also available, although currently limited to visible and near infrared wavelengths. However, compact lightweight camera designs often require compromises regarding spectral resolution and performance.
Spectral range
The spectral range determines the region of electromagnetic radiation measurable with the chosen device, and is often given in wavelength, or sometimes frequency, often expressed in wavenumbers (cm-1). The spectral range is vital to choose according to the target materials of interest, requiring a certain amount of knowledge of the expected diagnostic spectral properties. Different photoconductive sensor designs are required to cover different spectral ranges. While multispectral devices can provide discontinuous bands within different spectral ranges, by integrating multiple lenses, filters and CCD/CMOS chips, hyperspectral sensors typically cover a continuous spectral range. Few cameras embed multiple photoconductive sensors to cover broader spectral ranges with a single device, and currently, no single device covers all spectral ranges from visible to thermal infrared.
Spectral resolution
Spectral resolution is not only characterised by the number of spectral bands, but also other parameters such as band sampling and band width. For hyperspectral sensors the value given for the spectral resolution often refers to the band sampling, which is the distance between the band centers. The band width refers to the spectral response functions and is akin to a “spectral footprint”, often expressed as full wave at half maximum (FWHM). The band width often slightly increases with increased wavelength. High-end, high performance instruments minimise the spectral overlap between neighboring spectral bands. Spectral resolution is an important characteristic determining the level of detail to which spectral properties can be analysed, and therefore whether subtle material differences can be successfully discriminated.
Performance measurements
Performance measurements of spectral imagers is a broad topic, which can be only touched upon here. Parameters such as inherent sensor noise or optical aberrations should be carefully considered when choosing an instrument with appropriate application performance. The inherent sensor noise is often given as a single value expressed as the signal to noise ratio (SNR), though SNR is wavelength-dependent and should be therefore considered as a function of the spectral bands. Furthermore the SNR can be determined in different ways, making it difficult to compare non-standardised instrument specifications. Many hyperspectral imagers are designed as line sensors with diffraction gratings. In these sensors, keystone and smile effects appear as spectral distortion, and are thus critical performance measures. The keystone parameter expresses the inaccuracy of band-to-band registration, while the smile effect is the result of a wavelength shift between the pixels of the sensor line.
Final remarks
The development of spectral imaging technology is progressing rapidly and more trend-setting developments can be expected. This allows users, to an increasing degree, to choose camera models adjusted and best optimised for their desired applications.
Learn more on multispectral and hyperspectral cameras at Geo-matching.com.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















