
The Incremental Improvements in GNSS
Examining the Developments in Constellations, Augmentation and Receivers
What is the current state of GNSS, from both a constellation, augmentation and receiver perspective? Spoiler alert: it is more of an evolution than a revolution!
It is almost impossible to imagine geoinformation without GNSS nowadays. Even most geodetic services have switched to GNSS to maintain the geodetic reference network rather than using traditional optical techniques. This article explores the state of the art of GNSS, from both a constellation, augmentation and receiver perspective. Spoiler alert: it is more of an evolution than a revolution!
Global satellite navigation systems (GNSS) are everywhere. If you try to imagine geoinformation without GNSS, you will probably fail. Some people might say: ‘But what about my total station?’. But perhaps they are forgetting that most geodetic services have long since stopped surveying the control points using traditional, optical techniques and have switched to GNSS to maintain the geodetic reference network instead. So what is the current state of play when it comes to GNSS?
GNSS Constellations
The number of GNSS constellations has not changed over the past few years. Listed in the order in which they first became fully operational in their current configuration, they are: the USA’s GPS, Russia’s Glonass, China’s Beidou and Europe’s Galileo. Actually, Galileo should not be included if this is a list of fully operational systems, since – at the time of writing – only 21 of the planned 27 plus 3 satellites were fully usable, with another two in the commissioning phase. Hopefully, Galileo will also reach its full operational status at some point in 2022.
Besides these four global navigation satellite systems, there are two regional systems. The Japanese QZSS is probably the best-known one; with both geostationary and quasi-zenithal geosynchronous satellites, the system provides coverage of Japan. Another three satellites are planned for QZSS in 2023, bringing the constellation to seven satellites which will provide positioning over Japan (and Australia). The second regional system is NavIC (or IRNSS, as it was known until 2016), which orbits over India. Again with both geostationary and geosynchronous satellites, this system covers India and the Indian Ocean. As both QZSS and NavIC are purely regional, they cannot be used outside their particular region. This is in stark contrast to the ‘true’ GNSS, although Beidou is actually both regional and global; the system employs geostationary and geosynchronous satellites over China, as well as satellites that orbit the world in a medium Earth orbit like the other three GNSS. The advantage of this is greatly improved coverage over China (and Australia). As a result, the people with the best GNSS coverage in the world are probably the Australians, with a total of five available systems. India can also use five systems for navigation, although it is closer to the edge of Beidou’s coverage.
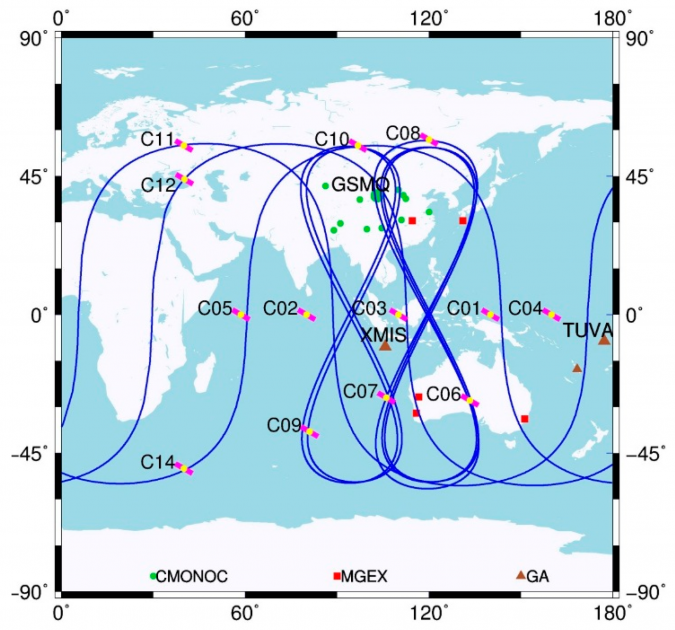
In terms of development within the various systems, the signal structure has remained the same for most systems and improvements have mainly been made in the control and positioning of the satellites themselves. Although relatively small improvements, they do have a sizable impact because a more accurately positioned satellite translates into better on-the-ground accuracy. The only system itself that has been improved is Glonass. Starting in 2018, a series of satellites were launched with the new L3OC signal. This CDMA signal is easier to implement than the so-called ‘standard’ FDMA signals because the CDMA signal uses similar techniques to those in the other GNSS. However, it has now been well over a year since the last launch (in 2020) and – especially considering the current conflict situation – the current plans for Glonass are unclear.
GNSS Augmentation
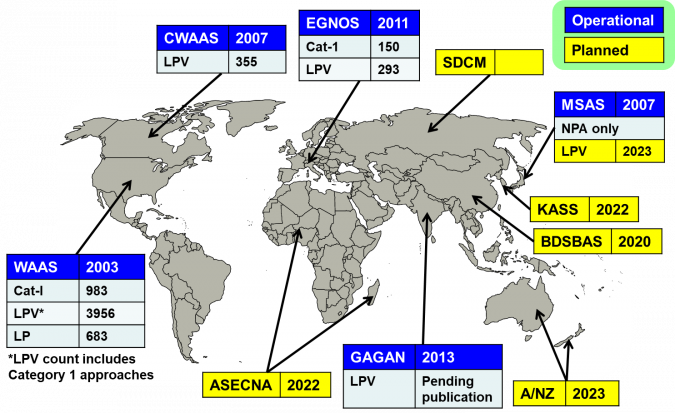
Whether for surveying and other professional geoinformation work or on smartphones or in vehicles, and whether in the USA, Europe or Asia, it is rarely the ‘raw’ GNSS signal that is used, but rather an improved, augmented signal. This is thanks to a number of ‘free’ (i.e. government-sponsored) space-based augmentation systems (SBAS): WAAS in the USA, MSAS in Japan, Egnos in Europe and Gagan in India. Other systems are at varying stages of development or certification, including SDCM (Russia), KASS (Korea), BDSBAS (China), SouthPAN (Australia), SACCSA (South/Central America and the Caribbean) and A-SBAS (Equatorial Africa). Each of these systems essentially functions in the same way. Control (‘base’) stations on the ground receive the satellite positioning signals and compare the signals actually received with those expected. Based on a number of these measurements, a set of corrections for the augmentation area are developed and transmitted to a geostationary satellite, from where they are sent back to the receivers in the GNSS frequency bands. These satellites are often recognizable in the sky plot by the ‘high’ satellite numbers they display.
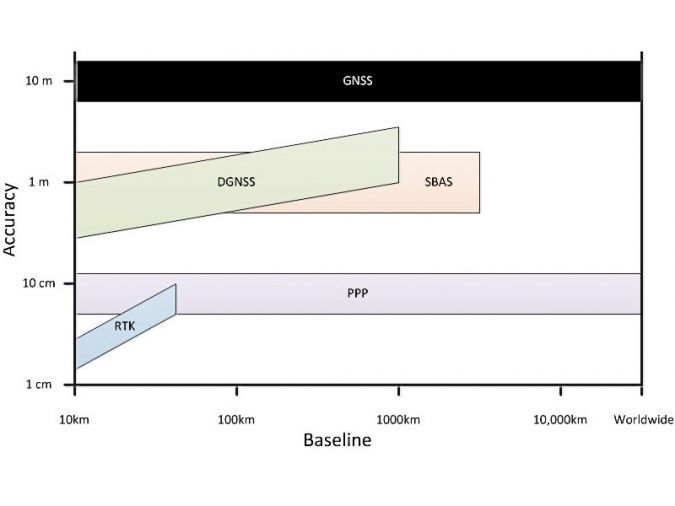
Due to the rather large areas covered by SBAS, the resulting accuracy is reasonable but not extremely high. When a high horizontal and vertical accuracy is required in land survey, real-time kinematic or RTK augmentation systems are used. Depending on the set-up, surveyors can use their own base station with UHF corrections, for example, or make use of an existing network. If an existing network is used, they can use corrections from a single base – but often, they use a virtual reference station whereby the network ‘computes’ a set of corrections as if the base station were located at or near the survey area. When using one’s own base station and post-processing the results (rather than using them in real time), it can even be possible to achieve sub-centimetre accuracies. The disadvantage of RTK is that the range is limited to around 15km from a (virtual) base station. Therefore, the use of RTK can be problematic, especially in remote areas with a limited geodetic or communication infrastructure.
Precise point positioning (PPP) lies somewhere in between these two technologies. Although it is not as accurate as RTK, the advantage of PPP is that it works over large areas without having to install one’s own base station. In PPP, data from ground-based stations is used to model the local errors in the GNSS observations (rather than transmitting corrections). Using an iterative process of predicting the model errors and comparing them to the real results, the receiver iterates stand-alone positioning to a high accuracy. A data link is still required in order to receive the model data, but this method is not limited by a range of just a few kilometres or the need to have local reference points. The latest commercial services using all available GNSS coverage are now achieving sub-decimetre results in terms of both horizontal and vertical precision.
The Galileo High Accuracy Service is based on the same principle, but with a horizontal accuracy of around 20cm and a vertical accuracy of around 40cm. The service is expected to become initially operational somewhere in 2022, and to become fully operational from 2024 onwards. For single points, results similar to the commercial PPP systems can often be obtained (but without guarantees) by various freely available post-processing services such as Auspos CSRS-PPP and Trimble CenterPoint RTX Post-Processing. Depending on the service, it may even be possible to post-process kinematic data rather than just static data.

GNSS Receivers
Just as with all hardware, the GNSS receiver is continuously being further developed. However, based on recent specifications, it is apparent that the development is more of an evolution than a revolution. Perhaps the greatest change to the GNSS receiver has been the addition of an IMU, allowing the user to hold the pole ‘at an angle’ while measuring. Although this introduces an additional error from the IMU, it allows the user to conduct surveys in difficult-to-reach places. Moreover, if the utmost accuracy is not required, surveys can be completed much faster too since the user no longer needs to wait for the bubble to centre before taking a measurement. Depending on the brand and model of the receiver, the achievable angles are anywhere between 15° and 60° of tilt.
Needless to say, the second major development is that the units are becoming ever-smaller for use on unmanned aerial vehicles (UAVs or ‘drones’). Whereas post-processed kinematic on a drone would have been regarded as a benefit a few years ago, nowadays multi-frequency RTK systems are starting to become the standard for high-end systems. This trend is enabling surveyors to obtain much better models without requiring as many ground control points to tie the photographs into the geodetic network.
Conclusion
As outlined above, there have been incremental changes in GNSS positioning over the last few years. With ever-growing GNSS constellations, further developments in augmentation systems and upgrades to receivers, things seem set to continue to improve in the (near) future.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















