
Flexible Cloud-based PPK Service Reduces Cost Barrier
Rokubun has developed a fast and flexible cloud-based PPK engine, known as JASON, aimed at democratizing precise positioning in the GNSS market.
Post-processed kinematic (PPK) GNSS has been a hot topic in the land surveying community for many years. Despite the well-established workflows for going from uncorrected field data to accurate positions, both the hardware and the software involved in that workflow have often been prohibitively expensive. PPK software from the major GNSS players usually ranges from US$3,000-6000 per licence. With the advent of single (u-blox NEO-M8T), dual (u-blox ZED-F9P) and triple-frequency (Septentrio Mosaic X-5) low-cost receivers able to output high-quality raw data at a low price point, the only missing part has been the software that ingests GNSS raw data and outputs accurate geolocation information.
In 2016, as part of its long-running work to democratize precise positioning in the GNSS market, Rokubun decided to create a cloud-based PPK service to remove the high cost barrier. In its current conception Rokubun’s PPK engine, known as JASON, is able to ingest data in many different formats (RINEX v2, RINEX v3, RTCM, u-blox, Septentrio, Android and others), automatically search and fetch the RINEX files of the closest base station to the rover receiver and compute PPK, precise point positioning or single point positioning on a best-effort basis. Additionally, should an end user want to upload their own base station file, JASON is flexible enough to do so. All these processes are performed with minimal end user interaction, reducing the chance of mistakes and the need for GNSS expertise, and at a price point never seen before, with the overall process not taking more than a few minutes.
Under standard operating conditions (good dilution of precision and within a baseline of less than 30km with a GNSS base station) , using dual (or triple) frequency GNSS rover and base receivers, for photogrammetric flights, centimetric root mean square horizontal errors are obtained.
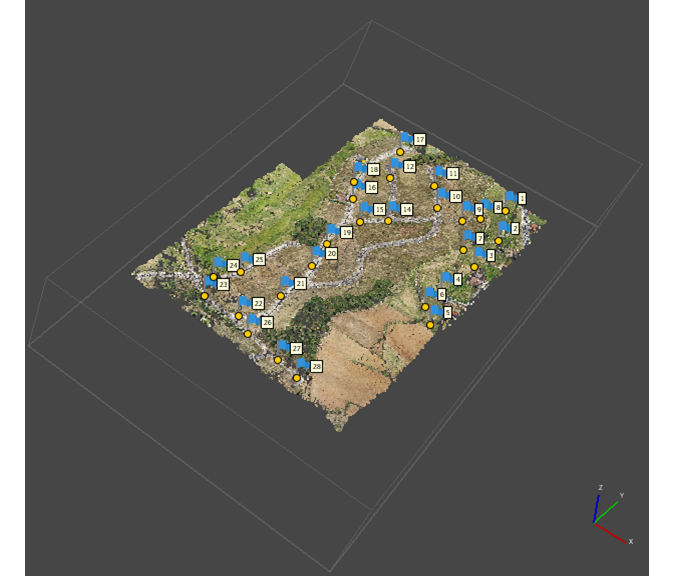
Rokubun is currently in the process of adding more functionalities to JASON, starting with a tool to allow EXIF data of drone-captured images. This will enable users to upload their campaign imagery and associated GNSS raw data file in order to obtain a file, containing synchronized precise coordinates for each captured image, ready to be imported into photogrammetric software like Agisoft Metashape or Pix4D. This means that owners of unmanned aerial vehicles (UAVs or ‘drones’) like DJI Phantom 4 RTK, which are able to record raw GNSS data, can conveniently obtain the precise coordinates of the images captured by the drone. In its current state, JASON is able to detect and register camera events from GNSS raw data with the highest matching rate of its class, providing a robust image-to-event matching result.
For more information about the cloud service plans and pricing, visit the JASON website.


Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)










