Help! What Should We Do With All These 3D Points?
SPAR Europe and European LiDAR Mapping Forum 2014 was held from 8-10 December 2014 in Amsterdam, The Netherlands. The event focused on the acquisition, generation, storage and processing of 3D point clouds. Today’s sensors are able to collect billions of points in just one hour of surveying. But help! How can we query these huge volumes of 3D points and how can we convert them into useful information?
(By Mathias Lemmens, senior editor, GIM International)
The sheer amount of 3D points and their attributes – such as intensity and RGB – collected by airborne and mobile Lidar sensors or terrestrial laser scanners, or computed from overlapping nadir or oblique imagery, is placing a huge burden on computers and storage devices. Indeed, the storage, management and processing of the brontobytes of data produced by Lidar or calculated from overlapping images requires considerable effort, and there is a growing consensus that massive point clouds raise issues which need to be tackled.
Point Cloud Management
During the event, Oscar Oscar Martinez-Rubi (Netherlands eScience Center) presented a paper by himself and Peter van Oosterom (Delft University of Technology). The paper compared the time of loading and querying of The Netherlands’ AHN2 height dataset as a whole and as subsets in several point cloud data management systems including Oracle, PostgreSQL, MonetDB and LAStools. The first three are database management systems (DBMSs) and the fourth one is file-based. AHN2 has a point density of 6 to 10 points per square metre resulting in a total of 640 billion (i.e. over half a trillion) 3D points covering the entire country. The queries concerned rectangles, circles and complex polygons of different sizes. A generic comment about which is the best system is almost impossible because performance depends on the type of queries one wants to carry out and these will be different for different users. Nevertheless, a tentative conclusion is that the databases using blocks perform better for the more complex queries, while LAStools performs best for rectangles, circles and other simple queries.
LAStools
Rapidlasso is the creator of LAStools, the open-source LASzip compressor and PulseWaves. LAStools processes billions of 3D Lidar points quickly and with high throughput, achieved through robust algorithms with efficient I/O and memory management. Martin Isenburg, scientist and owner of Germany-based rapidlasso, discussed the benefits of LASlayers: a new functionality that enables changes to raw LAS or LAZ files to be stored in small, separate files. The idea is that X,Y,Z coordinates, intensities, RGB, scan angles or other attributes do not usually change when processing 3D point clouds. Therefore, rewriting and duplicating unchanged data is unnecessary and only contributes to I/O load and slows down the workflow. Modifications, additions and removals of a few points or attributes extends the original data files with just one or at most a handful of LAY files, which require negligible storage space. A contractor based in India, for example, no longer needs to send entire LAS or LAZ files containing billions of 3D points to his client in Europe, but can instead send small files containing the few hundreds or thousands of modifications only.
Airborne Lidar
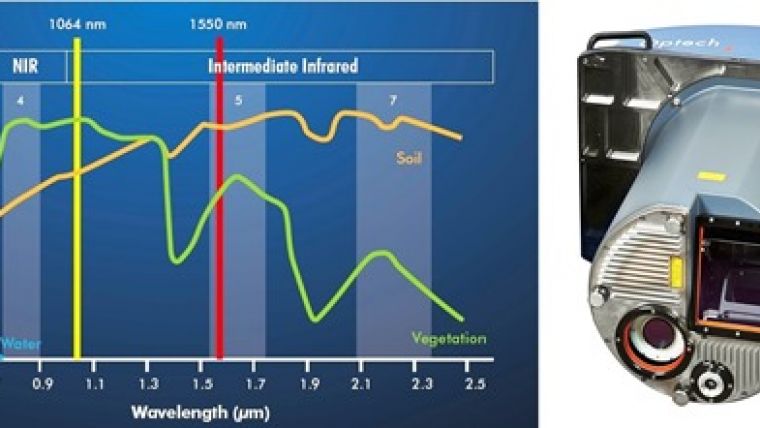
Optech introduced its new multispectral Lidar, which has been baptised ‘Titan’. The standard configuration emits three independent pulses in the wavelengths of 532nm, 1,064nm and 1,550nm – each with a 300kHz effective sampling rate for a combined ground sampling rate of 900kHz (Figure 1). The minimum flying height for both topographic and bathymetric surveys is 300m while the maximum height is 600m over water and 2,000m over land. The envisaged applications include topographic surveying, 3D land cover classification, environmental modelling, vegetation mapping and shallow water bathymetry. Nearly as new as the Titan is RIEGL’s VQ-880-G, an airborne Lidar designed for combined topographic and bathymetric surveying which was introduced at Intergeo 2014. The measurement rate is up to 550kHz while 160 scans per second can be made. Typical applications include mapping of coastlines, shallow waters, aggradation zones and habitats; point cloud collection for flood prevention; and surveying for hydraulic engineering and underwater archaeological sites. RIEGL also showcased the RiCOPTER UAS it has developed in-house. It can carry a payload of 16kg and is equipped with the VUX-1 Lidar sensor, which has a measurement rate of up to 500kHz and can make up to 200 scans per second. The eye-catcher from the French company L’Avion Jaune, founded in 2005, was YellowScan. With a weight of 2.2kg and a size of 20 x 17 x 15cm, the laser scanner has been designed for use on fixed-wing or multicopter UASs (Figure 2). It operates in the 905nm band and the maximum range is 100m. The sensor emits 80,000 pulses per second and records up to 3 returns per pulse.
The annual International LiDAR Mapping Forum, organised by SPAR Point Group, will be held from 23-25 February 2015 in Denver, USA. This event will likewise centre around 3D point clouds from airborne, terrestrial and underwater sensors.
More information on the mentioned products is available at Geo-matching.com.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)










