NavVis Launches New Solution for SLAM Precision
NavVis, a global leader in mobile indoor mapping, visualisation and navigation, has announced new mapping software that significantly improves the accuracy of simultaneous localisation and mapping (SLAM) technology in indoor environments, such as long corridors. The software update will be available for users of the NavVis M3 Trolley and will significantly improve the accuracy of the resulting maps and point clouds.
NavVis’ mobile mapping system, the M3 Trolley, builds upon SLAM to increase speed and efficiency when scanning buildings. SLAM is a technique originally developed by the robotics industry that is now increasingly being used in surveying and autonomous driving technologies. SLAM solves a core problem that long plagued robotics engineers by enabling a device to determine its location while simultaneously mapping an unknown environment. This is done by chaining millions of measurements into a trajectory estimate.
Drift error reduction
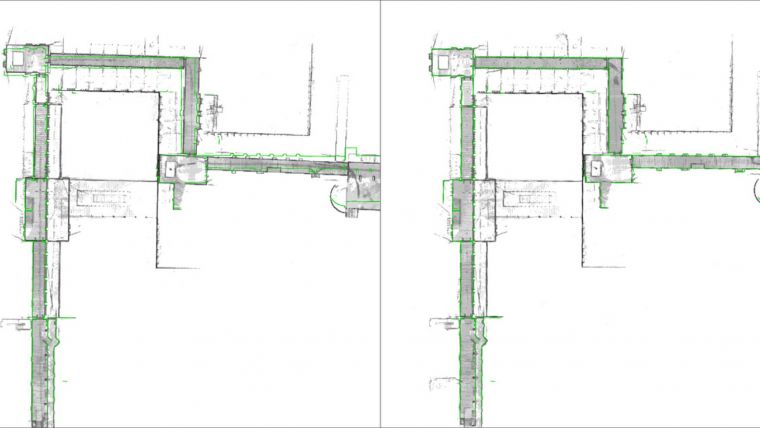
However, even when a device captures highly accurate individual measurements, chaining them will result in an accumulation of noise and tiny measurement uncertainties. Over time, the estimated motion will start to deviate from the true motion, which is known as “drift error”. This can often be observed as a slight bending of long corridors that are actually straight. All available SLAM systems – regardless of whether these use Lidar or other sensors – are inherently affected by this phenomenon.
The innovative NavVis Precision SLAM technology significantly reduces drift error and improves the SLAM accuracy. This is particularly evident in cases where complementary techniques such as loop closures cannot be deployed if, for example, the building’s layout does not allow for it. Precision SLAM even improves accuracy when SLAM anchors are used to incorporate ground control points into the mapping process.
Dr Stefan Romberg, head of Mapping and Perception at NavVis, said his company is always striving for the highest possible map and point cloud accuracy and improving SLAM is a critical component to being successful. It is widely known among SLAM developers and users that complementary approaches such as loop closures or ground control points are needed to achieve a high accuracy. Romberg added with the Precision SLAM technology they have developed an approach that not only nicely complements the former techniques but is especially evident when these have little effect or cannot be used.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)










