
Our fast-changing world demands aerial cameras that are more productive, versatile and cost effective. The WARP Omni convertible camera is engineered to be highly competitive with satellite and UAV imaging, allowing you to leverage your expertise in aerial mapping for a broader range of applications.
Nowadays, aerial images have become essential for various applications beyond just mapping. They are utilized in big data engines to influence multiple aspects of our daily lives, from city planning to agriculture. Images have evolved from raw input to valuable end products. In online maps, the map itself changes minimally, but overlay images are updated periodically.
Trends and challenges
For many applications, relative changes are more important than absolute values. Such applications rely on the availability of regularly collected images as well as accurate geometric, spectral and radiometric information. Consequently, data collection needs to be comprehensive and fast, capturing high-resolution snapshots of large areas quickly and routinely. 
Traditional aerial surveys using fixed-wing aircraft now face competition from satellites above and smaller uncrewed aerial vehicles (UAVs or ‘drones’) below. Although lacking in spatial resolution, satellite imaging provides broad coverage, useful update frequencies and no operating costs for users. Meanwhile, UAV imaging offers unmatched resolution and ease of use but is limited by smaller sensors and shorter flight times. Aerial imaging needs to offer high resolution, long flight times, efficiency and flexible update rates to stay competitive with satellite and UAV solutions. The WARP Omni is designed to ‘capture more, and more often’
State of the art
The oblique camera system consists of nadir and oblique sensors, which can be either metric medium-format or crop-size consumer sensors. The medium-format sensors offer up to 150 megapixels, providing excellent coverage and accuracy. Their lenses are of high quality, producing sharp and distortion free images across the frame. Both lenses and shutter are individually calibrated to achieve very high geometric and timing accuracies. The shutter speed can reach 1/2,500s while maintaining precise synchronization in a multi-sensor setup. On the other hand, UAV oblique cameras with crop-size sensors are gaining popularity due to their low cost and ease of use, despite lacking in frame size, lens quality, flight speed and coverage.
The WARP Omni was engineered to not only have all the benefits of a metric sensor system, but also to have double the capacity in key aspects. By improving usability and flexibility while controlling the cost, this enhances the overall cost eff ectiveness and return on investment (ROI).
Double the views
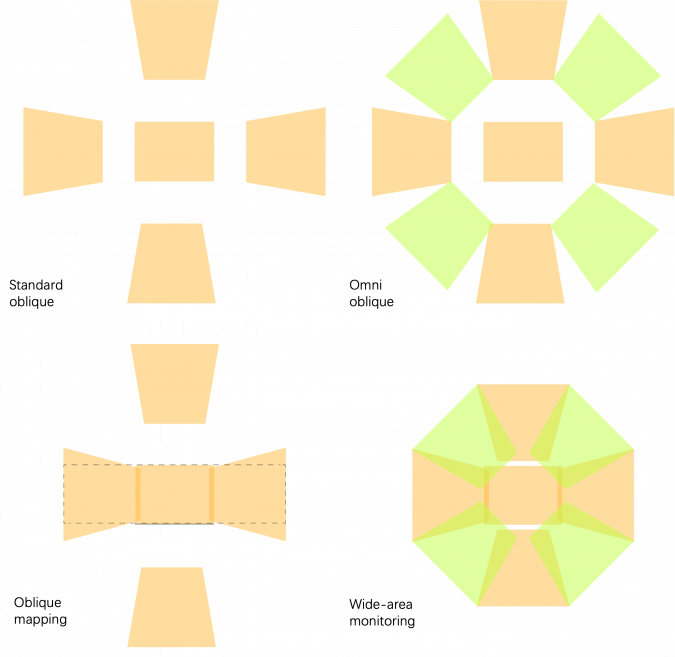
Oblique cameras capture images along parallel flight lines, with orthogonally placed sensors directing along and across those lines. Buildings aligned with flight lines yield better details than those that are not. Increasing overlap and capturing more images will not yield additional details, as fuzzy inputs cannot provide additional information. UAVs equipped with single oblique sensors, flying in circular mode, can generate precise 3D building models using fewer images compared to standard five-sensor oblique cameras. The more distinctive views are key to the improvement.
Through fast and precise rotation of the camera pod, the WARP Omni doubles the unique oblique views without a substantial increase in size, weight and cost. In contrast with integrating many smaller-framed oblique sensors, using metrically calibrated, precisely synchronized large-frame sensors eliminates the need to estimate sensor-intrinsic parameters and greatly reduces number of extrinsic parameters to be adjusted in aerial triangulation. This boosts processing speed and improves the quality of 3D results. The rapid, comprehensive and accurate capture of geotagged images of the large area beneath an aircraft is also advantageous for applications such as emergency response, search and rescue, situation monitoring, and wide-area intelligence, surveillance and reconnaissance (ISR).

Half the size
The WARP Omni is compact and self-contained, packing up to seven medium-format sensors with image acquisition and storage, flight management and position and orientation system (POS) into a pod that weighs only 30kg. Unlike other metric oblique cameras, its streamlined design and minimal external cabling enables precise and reliable rotation under typical flight conditions. Additionally, its compactness allows for quick installation by a single person, reducing operational costs.
Nadir widens in seconds
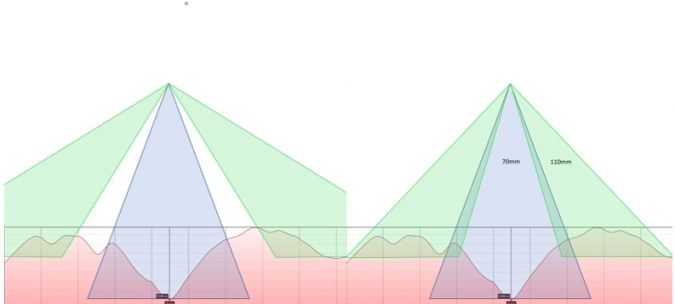
Large-format mapping cameras and oblique cameras have traditionally been separate products. As the survey market for 3D reality capture projects continues to expand, it is becoming less advantageous to keep two separate camera systems. The WARP Omni addresses this by supporting both oblique and nadir mapping modes, allowing for quick transition between them in flight. When commanded, precision actuators adjust the pitch of the left and right sensors until their views overlap with that of the nadir sensor to create a single stitched image with nadir ground sampling distance (GSD), but approximately twice its width. As standard, the WARP Omni is equipped with a 70mm nadir lens and four 110mm oblique lenses. The combined frame width exceeds 27,000 pixels with 80° field of view (FOV). If the left and right sensors are mounted with their long sides oriented cross-track, the resulting frame width reaches 29,000 pixels and 86° FOV.
In wide-frame mapping mode, the front and back sensors can remain at 45° or move together with the left and right sensors. At 45°, they provide along-track oblique views of ground features, enhancing 3D capturing. Meanwhile, the cross-track views form a single image with uniform GSD. This makes the WARP Omni particularly useful for corridor mapping, especially over mountainous terrain where standard oblique angles may result in views falling outside of the corridor area. If the front and back sensors are brought in along with the side sensors, the nadir frame effectively widens along the track. When the camera rotates to capture images in both the + and x directions, the frame coverage expands even further. Moving sensor footprints inwards also prevents obstruction and reduces atmospheric influence on oblique images when they are captured through the optical window of a pressurized aircraft at high altitude. The ability to quickly switch between oblique and nadir mapping modes offers greater flexibility to tackle applications with demanding quality, time and cost constraints.
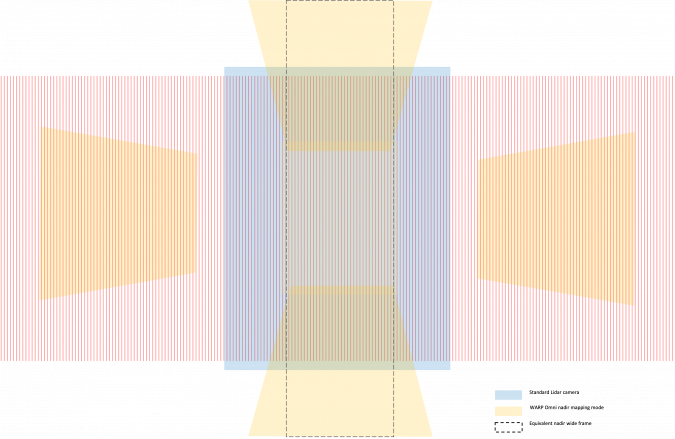
Works well with Lidar
Airborne Lidar solutions typically have 60° FOV, and a camera with a similar FOV is often used for reference images. A 150MP sensor with a 50mm lens is common. For a digital elevation model (DEM) mission, a 10-15% overlap between Lidar strips is sufficient, but this is not enough for generating a digital ortho map (DOM) from the images. Thanks to the WARP Omni’s combined nadir FOV of over 80°, images have side overlap of over 35%, meeting photometric requirements. Additionally, the longer focal length provides a 40% improvement in the GSD. Moreover, the camera can operate autonomously or in response to Lidar flight management system (FMS) commands. No separate planning is needed, making it ideal for time-sensitive projects like natural disaster assessment.
Sharp and fast
Flying at high speeds is crucial for productive aerial imaging. The shutter speed needs to be fast enough to capture clear high-resolution images from fast-moving aircraft. Mechanical forward motion compensation (FMC) and inertial-aided deblurring techniques have been used to reduce motion blur, but they have limitations. FMC only works for nadir sensors and not obliques, while deblurring is more effective for slower shutter speeds and lower resolutions, and is therefore often used in video rather than single images. In contrast, the WARP Omni uses sensors with an exposure time as low as 1/2,500s. It can reliably produce images with 10cm GSD at speeds over 250kts or 3cm GSD at 100kts. The camera also supports high-performance image acquisition and storage, allowing for sustained capture rates of up to two frames per second, which is essential for capturing high-resolution images with a large overlap during fast flights. Additionally, a customized gyro mount minimizes the negative effects of vibration and shock on image quality, ensuring consistent performance even in high-vibration environments such as helicopters.
Onboard operator optional
The WARP Omni is built on the same framework as the large-format multi-sensor payloads for long-endurance drones. These products have been successfully deployed in various installations since 2018, and have conducted autonomous missions in challenging environments including surveying, forestry, flood monitoring and earthquake damage assessment.
The camera’s FMS supports fully automatic closed-loop control of cameras and gyro mounts based on uploaded flight plans and position readings. It can also control external sensors like Lidar and hyperspectral cameras, enabling comprehensive data collection. The FMS efficiently handles large flight plans with thousands of lines and hundreds of thousands of photo points. The entire flight plan can be uploaded at once and executed autonomously, eliminating the need for manual line selection. The camera also supports ad-hoc image collection without predefined flight plans by using GPS positioning and a built-in global DEM. Moreover, the camera actively monitors and logs the health of its major components and environmental conditions.
Flexible and versatile
The WARP Omni offers exceptional flexibility in lens and sensor configurations for a multitude of projects. Users can choose combinations of nadir sensors, including RGB or NIR 150MP sensors, 280MP RGB and hyperspectral sensors. Lens options include 40/70, 70/110 and 110/150 in addition to the standard 70mm/110mm configuration. With its compact design and autonomous capabilities, the WARP Omni is suitable for a wide range of airborne platforms, including fixed-wing aircraft, helicopters and long-endurance drones, depending on the project needs.
Tested and proven
Since 2022, the WARP Omni has completed imaging of tens of thousands of square kilometres for diverse and challenging real-world projects including 3D terrain imaging, 3D city modelling and railroad planning. Operations ranging from 500m AGL at 100kts to over 8,000m at 240kts, and with airborne Lidar and spectral sensors, prove its efficiency, versatility, accuracy and reliability.

MORE INFORMATION