
Monitoring Coastal Erosion with UAV Lidar
Comprehensive Surveying of Coastal Topography
This survey in southern France confirmed the suitability of UAV Lidar for mapping shoreline changes in the context of erosion and drinking water availability.
The French Mediterranean coast is a complex natural environment where geology, climate and the sea interact and continuously reshape the landscape. Erosion and the availability of drinking water are two major coastal management issues that necessitate precise monitoring of the morphological changes to the shoreline. UAV Lidar is being used in this region to produce comprehensive topographic surveys with unprecedented productivity and level of detail. Several Lidar surveys are planned over the next two years. Read on for details of the context, technical setup and results of the very first survey which took place in January 2018.
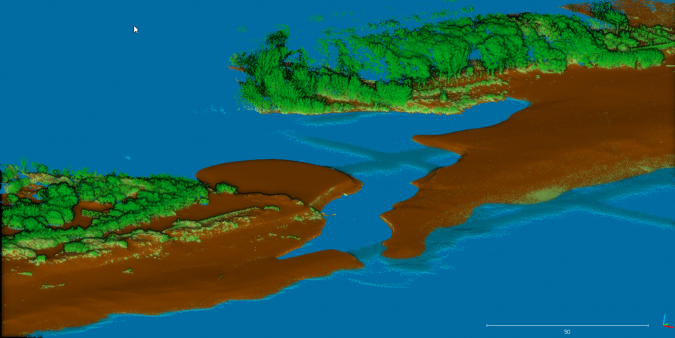
In the relatively dense settlement around Perpignan, called the Roussillon Plain, agriculture’s needs for irrigation combined with large volumes of tourists every summer put pressure on the reserves of drinking water. Meanwhile, seashore infrastructure and climatic changes impact the morphology of the coast, causing erosion that could result in salty seawater percolating into some of the groundwater reserves used for drinking water catchment (Pételet-Giraud, 2013). A regional consortium involving several private companies and public laboratories, led by the French Geological Survey (BRGM), has been set up to thoroughly investigate the availability and possible evolution of groundwater. The project, called DEM’EAUX, is also aimed at implementing and showcasing new survey technologies in this specific context. As a project partner, YellowScan is in charge of providing the oceanographers and geologists with Lidar surveys for the purpose of mapping and change monitoring and as input for sedimentation/erosion models. A pilot project area was selected at the mouth of the River Têt (Figure 1). The Têt has its source in the Pyrenees, and experiences very high flow fluctuations (Bourrin et al., 2008). As a consequence, its estuary experiences dramatic morphological changes, both seasonal and linked with extreme meteorological events such as flooding and storms.

Technical Choices
BRGM already monitor sections of the shore using photogrammetry, but the benefits of additional Lidar surveying include:
(1) Lidar provides a more accurate digital terrain model (DTM) when vegetation is present, which is the case in some dune areas
(2) Lidar data can be processed faster than UAV photogrammetry and much higher productivity can be achieved, enabling scaling up to large parts of the coastline. The 900m study area can be surveyed by UAV Lidar within minutes
(3) Lidar is expected to produce better reliability than photogrammetry over weakly textured surfaces (although a thorough data comparison still has to be performed to confirm this).

The instrument used for this survey was YellowScan’s Surveyor Lidar system, which is based on the Velodyne VLP16 laser scanner. It was selected for its combination of high productivity (300,000 shots/second over a 360°x30° angular range) and fair accuracy and precision (typically better than 5cm when compared to independent measurements on flat hard surfaces). The flights were operated by L’Avion Jaune, an aerial and unmanned aerial vehicle (UAV or ‘drone’) survey company specialised in natural environment mapping and a sister company of YellowScan. The drone used was the OnyxStar FoxC8 HD, a professional octorotor UAV which is part of L’Avion Jaune’s fleet (Figure 2).
Survey and Data Pre-processing
The survey area encompasses a 900m-long section of the shoreline, from the sea to 100m inland. The survey was performed by Pierre Chaponnière, an application engineer at YellowScan, and John Plaetevoet, a UAV pilot at L’Avion Jaune. Two flights were performed at an altitude of 30m and a ground speed of 5m/s, resulting in a point cloud of 43 million points and a typical density of 400 points/m², which is more than needed for the purpose of erosion/sedimentation monitoring. The swath obtained at 30m height was in excess of 100m.
Trajectography information recorded by the Applanix APX15 IMU included in the YellowScan Surveyor Lidar system was processed using the Trimble POSPAC In-Fusion single base software. The trajectory resulting from the PPK processing provides an estimated position accuracy of 2cm and an angular accuracy of 0.025° (roll/pitch) and 0.08° (heading). The YellowScan software was used to generate LAS files from post-processed trajectory and Lidar sensor data. Fine line matching and classification were performed with the TerraSolid modules TerraMatch and TerraScan.
Point Classification and Quality Assessment
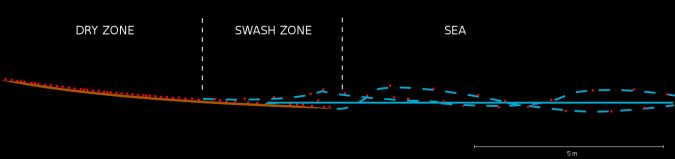
Five classes were defined: ground, water, and three classes of vegetation/objects according to height. Separating land and sea echoes in the swash zone was a challenging task; due to breaking waves on the shore, the altitude of the water surface varies, covering and uncovering the beach. In some places, the instantaneous water surface is far above the mean water surface, so that a crude screening based on altitude is not suitable. In the point could, the waves are seen as patterns similar to low vegetation, and some manual reclassification was needed to extract all the information from the data. The transition from land to sea is characterised by two criteria (Figures 4 and 5): (1) the point density decreases in the water as many laser shots are reflected to other directions by the sea surface, and (2) the vertical thickness of the point cloud increases due to the vertical movement of the water surface with waves. In some cases it was possible to follow the terrain below the mean sea surface, when the ground was uncovered by a wave trough during the scan.
A land and bathymetric survey was also performed on the same day as the Lidar survey. The land survey data provided by Yann Balouin (BRGM) and measured using an RTK GNSS receiver was used for validation.

A straight comparison between the points collected during the land survey and the Lidar DTM displays an average error (bias) of 4.0cm and a standard deviation of 9.5cm in Z, which is significantly larger than the 2.5 to 5.0cm usually observed with the same device in tests on hard, well-defined surfaces like roads or concrete. The main reason for this relatively high figure has been identified as the specific sampling strategy of the land survey; it was focused on the land-sea interface, where ground point classification is the most difficult, as well as on the sharp break in the slope of the beach (visible in Figure 1), where interpolation from the point cloud to a DTM is expected to produce the worst results. In view of the fact that the soft sand on the beach is far from a hard reference surface – a mere footstep will create a 5cm indentation – the resulting accuracy can be considered as a good outcome in very demanding test conditions.
Conclusions and Next Steps
This first survey has confirmed the suitability of UAV Lidar for the purpose of comprehensively surveying the coastal topography in a context of morphological changes. The point density in this survey is actually excessive and can be reduced significantly without any loss of information.
Today, the main limitations to productivity while surveying with UAV Lidar are the restrictions on UAV flights beyond line of sight. With the current setup and present regulations, a team can reasonably survey up to 10km of coastline per day in favourable conditions, outside urban or restricted areas. With a fixed-wing UAV and the relevant permits from the civil aviation authority, provided the safety of the flight and reliability of the UAV can be ensured, more than 100km would be technically achievable. YellowScan Lidar systems have already been tested successfully in several fixed-wing UAVs and will soon be implemented in operational surveys.
For the DEM’EAUX project, the surveying team is awaiting the day after the next winter storm to start a new survey and quantify the changes in the topography. This flexibility of mobilisation is one of the major benefits of UAV operations. A series of surveys over a two-year period are expected to bring new insights into the dynamics of the river estuary.
Acknowledgements
Thanks are due to the development team of the open-source software CloudCompare used for data visualisation and analysis in this project. Project partners BRGM and CEFREM contributed valuable data and context information. YellowScan and L’Avion Jaune teams provided practical help and advice. This survey was conducted within the DEM’EAUX project, which is supported by the Région Occitanie-Pyrénées-Méditerranée and funded by the European Regional Development Fund.
References
Bourrin, F., Friend, P.L., Amos, C.L., Manca, E., Ulses, C., Palanques, A., Durrieu de Madron, X. and Thompson, C.E.L. (2008). Sediment dispersal from a typical Mediterranean flood: The Têt River, Gulf of Lions. Continental Shelf Research, 28(15): 1,895-1,910.
Pételet-Giraud E., Négrel Ph., Guerrot C., Aunay B., Dörfliger N. (2013): Origins and processes of salinization of a Plio-Quaternary coastal Mediterranean multilayer aquifer: the Roussillon Basin case study, Water Rock Interaction [WRI14], Procedia Earth and Planetary Science (7), 681-684.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















