Point clouds as the future topographic core data
Technologies and means towards a paradigm shift
Could 3D point cloud data be used as the framework for topographic information in the future? Point clouds can be captured with an ever-increasing number of means from ground-based, airborne and spaceborne platforms to understand the surrounding reality and detect critical developments. What are the future technologies and processes that will build the capability for high-density 3D data? This article explores the possibilities based on the latest developments in the industry.
‘Data on demand’ is a recognized megatrend in the geospatial industry. National topographic databases store data refined from field measurements, imagery and laser scanning data at certain specifications and for certain purposes, but lack the dynamic aspect in terms of human aspirations, changing needs and situational awareness.
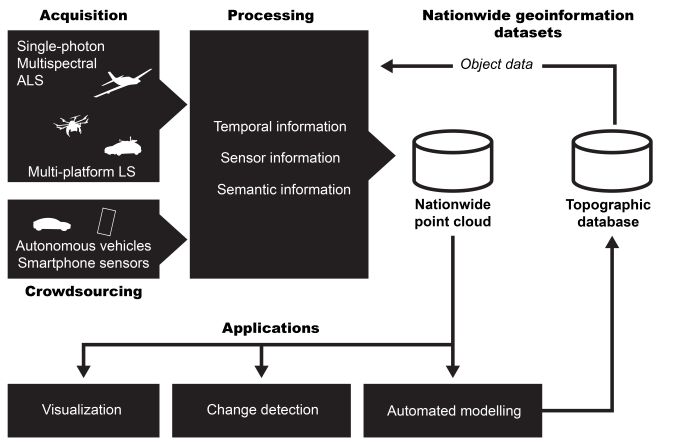
Framework for future topographic data
Point cloud data can be captured with an ever-increasing number of means from ground-based, airborne and space platforms, helping users to understand the surrounding reality. Different scales and viewpoints – from grain scale to a global overview – provide comprehensive multimodal data for environmental analysis, assessment of natural resources and development of urban infrastructure and critical services. Semantic point clouds, temporal coverage, multimodal data sources and automated processing form the framework for future topographic data.
Multi-platform mobile laser scanning
Vehicle-mounted laser scanning systems have proven to be very efficient in measuring road and city environments. Multi-platform systems expand the use cases of mobile laser scanning (MLS) to natural environments, industrial installations and urban environments that cannot be easily accessed by a vehicle-mounted system. With the development of algorithms that allow simultaneous localization and mapping (SLAM), mobile laser scanning has also advanced to provide 3D data from GNSS-denied environments, e.g. indoors and industrial sites.

Affordable high-performance systems are already changing the ways of producing topographic data. The unmanned aerial vehicle (UAV or ‘drone’) is an emerging technology that, coupled with advanced systems featuring laser scanning and imaging sensors, enables rapid capturing of aerial data for various purposes. Combining UAV-based airborne sensors and mobile laser scanning with imagery brings together the flexibility of mobile systems and allows short response times and low mobilization costs. Use of these systems provides data with minimized occlusions enabled by easily accessed viewpoints. This data typically represents the objects of interest in a very high level of detail, down to a scale of a single railing, cobblestone or cable.
Autonomous vehicles and crowdsourced mapping
Autonomous vehicles have attracted considerable industrial interest in recent years. Following the DARPA Grand Challenge competition for self-driving cars, several major manufacturers have announced their future goals of providing autonomous vehicles. This requires fitting the vehicles with highly capable 3D mapping systems, much like those encountered in contemporary MLS. For the geospatial information community, these future autonomous vehicles are a potential source of highly detailed and frequently updated 3D mapping data.
In addition to vehicles, 3D mapping capabilities are increasingly carried by consumers in their smart devices. At the simplest level, smartphone camera images and positioning information may contribute to mapping. More capabilities are offered by other sensors such as depth cameras and 3D image interpretation. These technological developments hold the potential to replace the prevailing centralized mapping conventions by decentralized, distributed and frequent crowdsourced mapping.
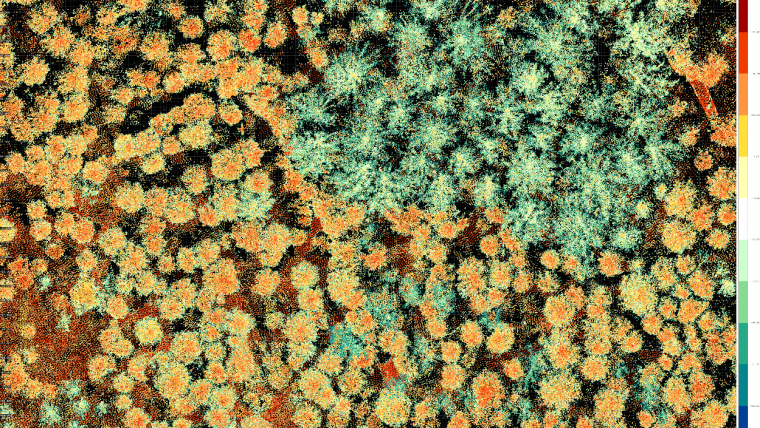
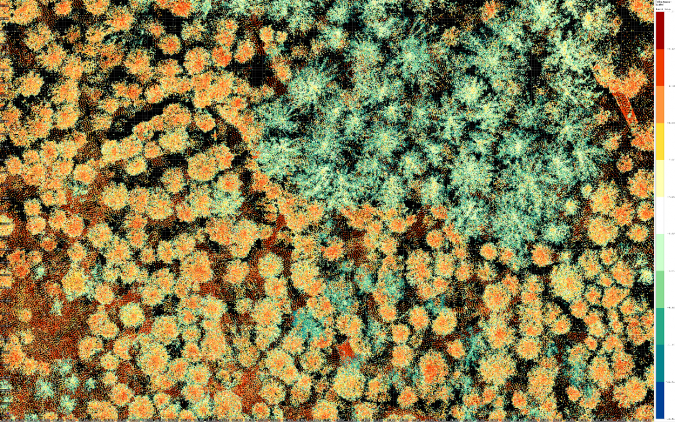
Multispectral sensors – colour vision with laser
Multispectral laser scanning technology is currently in its technological adaptation phase, promising an increase of active spectral information for mapping and detection. The first example of this was the recording of laser backscatter intensity and the use of intensity values in the visualization of point clouds and in certain classification tasks. The emerging multispectral laser scanning (e.g. Optech Titan for ALS) increases the amount and quality of spectral information obtainable. Actively sensed radiometric properties of target objects do not suffer from illumination variations and anomalies caused by solar illumination present in passive imaging products. The autonomous driving industry is also expected to explore this opportunity in the future.
Classification results with the data from the first multispectral ALS systems have been promising. For example, a very high overall accuracy (96%) of land cover classification results has been achieved in some studies, with six categories (building, tree, asphalt, gravel, rocky, low vegetation).
Single-photon systems
Single-photon technology is an emerging technological breakthrough for airborne laser scanning. Single-photon systems require only one detected photon, compared to hundreds or even thousands of photons needed in conventional Lidar. As a result, pulse densities of ten to 100 times higher can be obtained compared with conventional sensors. In addition, the sensitivity of the detector to energies in the single photon range allows the systems to attain higher maximum ranges and remain eye-safe. This has also contributed to the recent launch of spaceborne Lidar for global monitoring aboard ICESat-2 ATLAS. Similarly, the single-photon technology can be used in autonomous driving and drone sensors.

Change detection and automated modelling and mapping
The developments in acquiring point cloud and spectral data are significantly increasing the data volumes produced. Automation is needed to translate the increased measuring frequency and point cloud density into efficiency and a high level of detail in mapping. The emergence of national laser scanning campaigns, such as those in the Netherlands, Sweden and Finland, highlight the need for automated processing methods.
On a more limited scale, multitemporal point clouds have been applied to change detection, both in the urban and natural areas, for management of resources and coping with hazards, effectively showing the potential of multitemporal 3D data. Combining these methods with automation and periodically repeated countrywide scanning campaigns would allow spectral and geometrical change detection in unseen detail.
In addition to change detection, automation is required for various modelling tasks. In urban environments, the automated generation of simple building models has become the default approach for 3D city modelling. Several algorithms for detailed building modelling have been introduced, potentially raising the level of detail in automated modelling. In a similar fashion, algorithms have been developed for modelling road environment objects from dense mobile laser scanning point clouds. In natural environments and forestry, point cloud datasets have been applied both for producing parameter information over larger areas – e.g. for hydraulic modelling and flooding analysis or permafrost processes – and detailed modelling of individual trees for forest resource assessments.
Ideally, the change detection and modelling should be combined. Possible changes are detectable based on multitemporal data, and modelling, maintenance or any similar action or effort can be focused based on data-derived signals or an early warning to save costs and avoid indirect damage.

Point clouds as national core datasets
Current topographic databases are commonly based on aerial images and maintained by national mapping agencies, with a significant amount of manual work. Developments in laser scanning and point cloud processing could provide significant cost savings via automation in mapping. Upcoming single-photon technology has the most potential as a sensor solution for providing dense point clouds with low unit costs for country-level data acquisition. Multimodal laser scanning from airborne and terrestrial perspectives can be utilized for obtaining more detailed data from selected areas.
Dense point clouds with spectral information provide a common starting point for automated modelling workflows and direct visualization applications, forming the future topographic core data. They represent a significant asset for business in improved forestry and infrastructure management, and provide a platform for developing several future applications.



Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















