Precise Point Positioning from Combined GNSS
Fugro Marinestar G4+ PPP-RTK Developments
Currently there are four global navigation satellite systems (GNSSs) available: GPS, Glonass, BeiDou and Galileo. The satellites of these systems are used for positioning, and the accuracy is greatly improved if precise satellite orbit, clock and uncalibrated phase delay (UPD) corrections are available when using the precise point positioning (PPP) technique. Fugro operates a worldwide network of reference stations capable of tracking GPS, Glonass, BeiDou and Galileo systems. This network is used to calculate precise satellite orbit and clock corrections of all four constellations in real time for maritime applications. The corrections are broadcast to users by eight geostationary L-band satellites providing worldwide coverage. This article describes the recent developments and the resulting accuracy of PPP with integer ambiguity resolutions (IAR).
(By H. Visser, D. Lapucha, J. Tegedor, O. Ørpen and Y. Memarzadeh, Fugro)
The Fugro Marinestar G4 service uses all four global satellite constellations. However, not all four constellations have the same geographical spread or the same number of available satellites. Therefore, one must consider the strengths and weaknesses of each constellation. The tracking status for each GNSS, based upon a minimum elevation of 5°, is given below.
GPS
In December 2016 there were 31 healthy US GPS satellites. In the current constellation, 19 Block IIF satellites transmit the additional L2C signal, which is 3dB stronger than the legacy L2 signal. This allows for better tracking in marginal circumstances and no impact on L2C when the L1 signal is jammed (in contrast with the legacy L2 signal, which will be affected). According to the Marinestar GNSS network data, between six and 13 GPS satellites are usable on a daily basis. However, local blockage and interference can reduce this to fewer than 4 satellites for individual users, which is not sufficient for a position calculation using a single system. Positioning can be affected by short GPS radio interference.
Glonass
Currently 24 Russian Glonass satellites are available, with two additional test satellites. Some satellites can have a higher clock noise and are unusable for PPP-RTK so can be removed from the Marinestar service. Between four and ten Glonass satellites are visible for users anywhere in the world at any one time. Glonass can be affected by Iridium or Globalstar interference whilst the L2 band can suffer amateur radio interference.
BeiDou
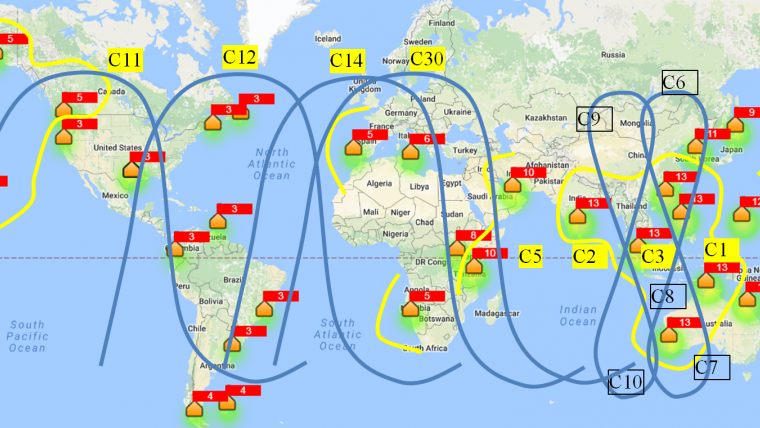
The Chinese BeiDou navigation system currently has a constellation of 14 operational satellites consisting of five geostationary satellites (GEOs) above the equator covering China, five inclined geosynchronous satellites (IGSOs) and four medium Earth orbit (MEO) satellites. The MEO satellites rotate around the Earth 13 times in one week. In East Asia and Australia, between six and 14 BeiDou satellites are always visible. The MEO’s availability in the Americas is between zero and three satellites (see Figure 1).
Galileo
Up to December 2016, 18 Galileo satellites had been launched with 11 now available for positioning. Satellites E14 and E18 are in an elliptic orbit and could be used in the future (see [1] Tegedor, ENC2016). There are between two and seven Galileo satellites in view in the network at any one time. A Galileo-only position is possible anywhere in the world for 60% of the time. On 17 November 2016, four extra satellites were launched; two are planned to become available in April 2017 and the other two in June 2017. However, even with just two Galileo satellites in view, Galileo adds value due to the accurate clocks and increased availability of signals and enables Galileo-aided positioning using Fugro’s G4+ service.
Based on this overview, it is clear that no single constellation allows consistent positioning for a user. The total number of available satellites right now is 80 (31 GPS, 24 Glonass, 14 BeiDou and 11 Galileo), and when all constellations are fully established in 2020, there will be 121 satellites (32 GPS, 24 Glonass, 30 Galileo and 35 BeiDou). Fugro’s Marinestar G4+ uses measurements from all four constellations (hence the ‘G4’ name) and currently broadcasts orbit and clock corrections for GPS, Glonass, BeiDou and Galileo. Broadcast of Galileo orbit and clock corrections started on 15 December 2016 when the GSA declared the “Galileo Initial Service”. Additionally G4+ fixes the ambiguities to their integers on GPS (hence ‘+’) to allow for PPP-RTK positioning (see [2] Tegedor).
Orbit and clock corrections
Fugro’s Marinestar service provides precise point positioning using GNSS data from a globally distributed network of reference stations. Using these stations the precise orbit of each GNSS satellite is determined and transmitted to the user every minute. The satellite clock error is also measured and transmitted with a high update rate.
Over the years the accuracy of the orbit and clock solution has improved: for the G2 Glonass/GPS solution from 10cm to 6cm horizontally and from 18cm to 10cm vertically (see Figure 2).
Since the newer satellites have more signal power, better antenna gain and better receiver tracking, the minimum elevation can be reduced. Lower elevations help when large parts of the sky are affected by scintillation.
Thanks to improved rubidium clocks in the GPS IIF satellites it is now possible to extend the age of the clock corrections from five to ten minutes and still obtain good results although the position degrades slowly as the age increases (see Figure 3). Increased age helps to overcome L-band scintillation (L-band scintillations last typically less than ten minutes, as does heavy rain at a satellite uplink).
Over time, GNSS satellite clocks can become noisier. Typically, these satellites are within the specifications for general use, but for high-end PPP-RTK services such as G4+ they are a challenge as the variations can be up to 10cm. This clock jitter can also be removed within the Marinestar service.
Benefit of multiple constellations
Having multiple constellations provides a benefit. Having more measurements is crucial during heavy scintillation in the equatorial region as seen in Africa and Brazil in 2013-2015. For positioning based on GPS alone, more measurements are crucial because, due to occasionally unhealthy satellites, there are not always sufficient GPS satellites available (see [6] NANU’s). The addition of Glonass measurements significantly improves the situation.
Adding BeiDou to the PPP solution improves availability, although the BeiDou GEO and IGSO orbit accuracy is lower due to the larger distance to the Earth. However, the satellites are very helpful in fixing short-term data gaps due to, for example, local interference or cases of GPS L1 jammer interference in which the GPS L1 frequency of 1,572MHz is blocked but the BeiDou B1 frequency of 1,561MHz survives (Figure 4). In the case of Iridium/Globalstar interference, the BeiDou B1 frequency is still tracked while Glonass L1 – and to a lesser extent GPS L1 – signals can be disturbed.
PPP versus PPP-RTK
The accuracy of PPP can be further improved if the total wavelengths from the receiver to the satellite can be resolved (see [4] Liu). Fugro’s Marinestar service offers G4+ with GPS integer ambiguity resolution using additional corrections of satellite UPDs generated within the Fugro network of 100 reference stations.
By applying precise orbit and clock corrections in the network of reference stations with inter distances of 1,000-2,000km, it is possible to estimate the UPDs precisely for GPS observations in real time.
The UPD corrections are broadcast over the satellite links to the G4+ users. In the user’s receiver, integer numbers of GPS ambiguities are solved using the LAMBDA method (see [3] Teunissen). The fixed GPS ambiguities are then used in the solution model to calculate more precisely the final position (G4+) solution using GPS, Glonass, Galileo and BeiDou observations.
Fixing the integer ambiguities requires better measurements than traditional PPP. Items affecting the final accuracy are:
- Radio interference: far-away radio interference, which is normally not noticeable, does affect positioning
- Antenna type: a choke ring or high-end geodetic antenna gives better multipath resistance. However, due to practical considerations, a marine antenna is usually preferred with less multipath resistance
- Tropospheric error: high humidity and heavy tropical rain showers can result in unpredictable, tropospheric range errors (see Figure 5)
- Phase multipath: traditional code multipath in the range of one to five metres affects performance of L1 code. Phase multipath due to nearby reflections of the antenna such as placement on a horizontal pole or close to metal obstructions influences PPP-RTK solutions.
Conclusions
The quality of Fugro’s Marinestar positioning services is continuously improving. Overall and due to the reduced ionospheric disturbances after the solar maximum, GNSS positioning results will be better. The typical accuracy of the G4+ solution is better than 4cm in horizontal and 8cm in height. The horizontal improvement of a G4+ PPP-RTK over a PPP G2 solution is between 6% and 27% horizontally and between 2% and 8% vertically. The improvement in height is limited by tropospheric error. Positioning by PPP-IAR techniques also requires more attention to the receiver-antenna set-up and surveyor’s environment.
Further reading
- [1] J. Tegedor (2016), The Galileo contribution to Fugro’s G4 precise point positioning service. ENC 2016, Helsinki, Finland, 30 May-2 June
- [2] J. Tegedor (2014), Use of BeiDou in operational precise point positioning service
- [3] P.J.G. Teunissen, The least squares ambiguity decorrelation adjustment: a method for fast GPS integer estimation. Journal of Geodesy 70:65–82, 1995
- [4] Liu, Xianglin, Real-time multi-constellation precise point positioning with integer ambiguity resolution, Conference paper IAIN October 2015
- [5] Benton, C. J. and Mitchell, C. N., 2014, Further observations of GPS satellite oscillator anomalies mimicking ionospheric phase scintillation. GPS Solutions, 18 (3), pp. 387-391
- [6] http://www.navcen.uscg.gov/?pageName=gpsAlmanacs
Biography of the Authors
Hans Visser, a geodesist from Delft University, has been working in the field of GNSS for the last 30 years. He works for Fugro-Intersite BV in The Netherlands.
hans.visser@fugro.com
Dariusz Lapucha holds a PhD in geodesy from Warsaw University of Technology, Poland and an MSc in surveying engineering from The University of Calgary, Canada. He is a senior geodesist at Fugro Chance Inc., Lafayette, USA. He has worked for Fugro Chance since 1991 in the field of high-precision satellite navigation.
Javier Tegedor holds an MSc in telecommunications engineering from the Polytechnic University of Valencia 2005. He has a PhD in geomatics from the Norwegian University of Life Sciences. His main research topics are multi-constellation orbit estimation, precise point positioning and ambiguity resolution. He is a GNSS scientist at Fugro Satellite Positioning AS.
Ole Ørpen holds an MSc in control theory from The Norwegian Institute of Technology. He has been working with satellite positioning since 1978, initially at the Norwegian Defence Research Establishment, and since 1987 in private industry. He is a senior scientist at Fugro Satellite Positioning AS.
Yahya Memarzadeh received his PhD in satellite geodesy and ionosphere modelling from Delft University of Technology in 2009. He is currently a geodesist in the R&D team of GNSS precise positioning and ionospheric scintillation monitoring at Fugro Intersite B.V. in The Netherlands.
Figure Captions
Figure 1, Typical maximum number of tracked BeiDou satellites, 21 August 2016.
Figure 2, Improvements of the Marinestar solution in height over the years.
Figure 3, Horizontal (3a) and vertical (3b) standard deviation in centimetres versus age of correction in minutes for the G2 service in Karratha in NW Australia for 10 January 2015.
Figure 4, 11 BeiDou satellites (yellow) fixing a GPS L1 jamming position gap (orange) in Perth on 1 November 2016.
Figure 5, 12-year variation of the ‘Zenith Wet Delay’ tropospheric error (image courtesy: Sam Storm van Leeuwen).

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















