Proving the Rescue Potential of Multi-sensor UAVs
Venturing into Disaster Zones
When disaster strikes, the courage and experience of rescue task forces is put to the test. They face heading into the unknown every time they enter a terrain during a rescue mission. Efforts to implement the latest technological tools, such as unmanned aerial vehicles (UAVs), to support their work are aimed at providing safer working conditions for rescue teams and speeding up search activities to improve the efficiency of the entire rescue mission. UAV reconnaissance is considered a very powerful way of overcoming the potentially dangerous lack of information in affected areas.
Specially equipped unmanned aerial vehicles (UAVs or ‘drones’) have in the past been proposed for firefighting, for search missions, for delivery of rescue kits, and many other impressive tasks. There are high expectations of the use of drones for this type of work, and for obvious reasons: they can go where it would be too hazardous or even impossible for manned aircraft to go. This is one of the major arguments for UAV utilisation.
Simulation of a Contaminated Landscape
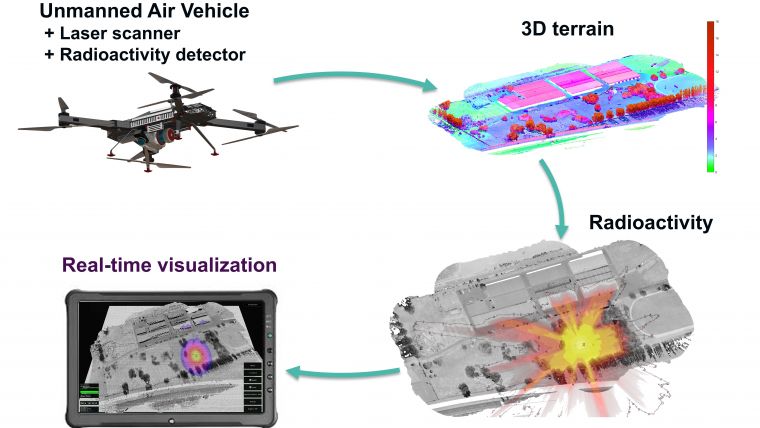
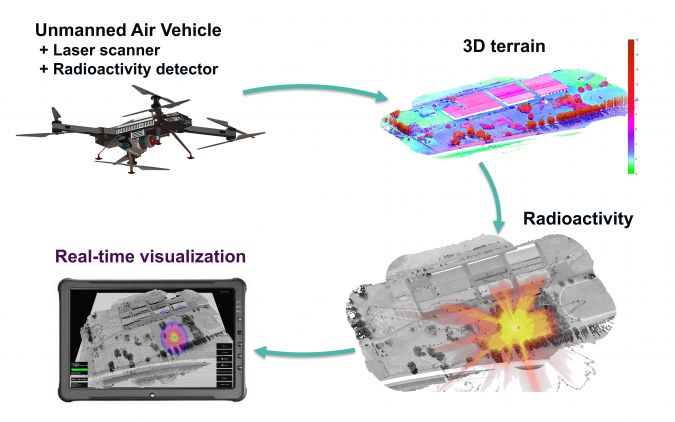
An experiment was carried out within the framework of the Austrian research project called ‘SecuRescue’. The following emergency scenario was imagined for a test setup: a disaster, caused by natural forces or technical failure, hits an urbanised and partly industrial area. The immediate effect is complete destruction of the topographic array caused by collapsed buildings, making existing maps useless. The test focused on how to provide essential access information to first responders as quickly as possible, and ideally in real time. Furthermore, sources of hazard – which could include things like contamination by toxic gas leakage, risk of fire or explosion – were to be identified. In this test scenario, nuclear radiation was the simulated danger.
The scenario included as many factors as possible in order to adequately reflect the complexity of such a situation. Emergency forces are familiar with such scenarios, in which everything can be expected and nothing can be ruled out. Creating a scenario such as this also helped to explain in an experimental way which technical solutions might be proposed to confront it: what kind of information is crucial, how it is to be obtained and communicated to the rescue team, and how a UAV can be safely employed in these conditions. Performance criteria and methodological considerations had to be taken into account when choosing the sensor system configuration, as well as the UAV that served as the carrier platform.
Lidar for reliability and precision
The RIEGL VUX-1UAV Lidar system was used for acquiring the precisely updated topographic information. The VUX-1UAV is a survey-grade laser scanner with a rotating mirror, a 330° field of view and a rate of up to 500,000 measurements per second. It is a very lightweight and compact laser scanner, meeting the challenges of UAV survey requirements in terms of both measurement performance and system integration. In normal circumstances, the measurement data of the VUX-1UAV is stored on an internal SSD drive and processed offline after data acquisition. With the associated post-processing toolchain, a measurement accuracy of 10mm is achieved.
According to Dr Martin Pfennigbauer, CTO and director of research at RIEGL, the specific challenge of the application lies in the fact that information is conventionally accessed and analysed from Lidar data during post-processing. However, time is of the essence in rescue missions; first responders need immediate information in order to safely access the terrain. So while reliable and precise data acquisition is well within the proven capacity of state-of-the-art Lidar surveying, it is tricky to select from the enormous amount of data only that part of the information which would be relevant for orientation and localisation purposes and to subsequently transmit it in real time.
GNSS for real-time processing
Therefore, the real-time data processing approach relied on a completely different processing method. Raw laser scanning data was immediately processed and fused with the real-time trajectory generated by the GNSS/IMU system. The GNSS system had no access to any kind of correction signal, resulting in an absolute height error of up to 2m. The described approach achieved a net rate of 50,000 acquired and real-time-processed measurements per second, requiring a bandwidth of roughly 10Mbit/s for the radio communication link to the ground station.
Gamma radiation sensor
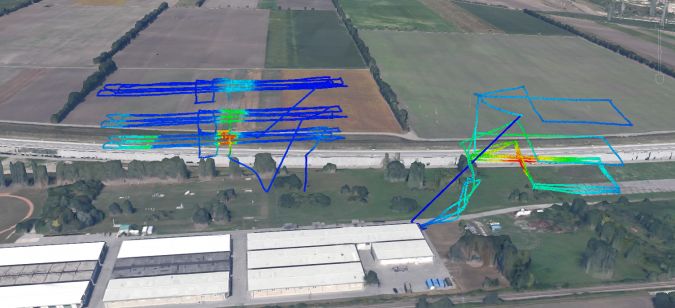
A gamma radiation sensor was used to analyse the potential nuclear contamination. The weight of the commercially available gamma radiation probe was significantly reduced by using a customised lightweight housing with a volume of 420ml. Radiation measurement is based on a plastic scintillator with a photomultiplier attached. Gamma and beta radiation hitting the crystal is displayed as pulses, which are detected and converted to counts per seconds (CPS) by an internal processor. The high voltage needed for this measurement principle is created within the gamma radiation probe in a specially shielded housing. The current CPS is continuously provided every 250ms over a serial communication port. This measurement rate enables high-resolution acquisition of the local radiation pattern. In the test scenario, the same flight pattern was executed at different heights to support a precise localisation of the gamma radiation source, in this case caesium and cobalt radiation sources.

The complete sensor payload consisting of the laser scanning system and radiation sensor was integrated on the RIEGL RiCOPTER-M, a 35kg electrical octocopter with 10kg maximum sensor payload. The high-performance UAV (flight time of up to 30 minutes with full payload) has been especially designed for operation in particularly sensitive areas. It can optionally be equipped with LED projectors for night-time search missions, as well as an infrared camera or other sensors. For the present test setup, flights were carried out in daylight and under fair meteorological conditions.
Helping without Hindering
As the RiCOPTER-M must be safely operable even above populated areas, it is resilient to all main signal failures. To achieve this, two completely independent flight controllers with separate power supply and dedicated sensory hardware (i.e. GNSS, gyroscope, accelerometer and compass) are integrated. The sophisticated design permits operation with the utmost reliability. Nevertheless, while expectations for UAV use in disaster management are high, there is still some concern that they could present a disturbance if not a threat – to rescue teams, especially with regards to how to coordinate them with manned search & rescue helicopters.

For this reason the RiCOPTER-M was operated with an ADS-B/Mode S transponder from Sagetech, in coordination with air traffic management. The integration of this transponder on the UAV presented certain challenges; it had to be thoroughly tested to rule out any interference between the transponder and the UAV remote control, onboard electronics and sensor payload. This could be attained by installing the transponder antenna at a sufficient distance from the UAV electronics and antennas. Besides these precautions, the design and material of the UAV may influence the necessity for adapting the installation. In the case of the RiCOPTER-M, carbon fibre for the aircraft fuselage and aluminium for electronics housings has proven a favourable material combination in supporting interference-free integration. The resulting emission range achieved by this setup is 30km.
Airspace rules clearly dictate that manned aircraft take priority at all times, so a UAV’s flight path has to be chosen accordingly. In addition to receiving priority in the air, it could be reassuring for pilots to have any UAV in their vicinity clearly displayed on their screen and to also have the possibility to rely on Air Traffic Management warnings or separation.
Next Steps
This test focused not only the results but also on the overall workflow. The potential of the information contained in the acquired data is undisputable, but there is always room for improvement. Just some of the ideas for the follow-up test are to include additional sensors on the multi-sensor-platform to achieve even more information output at a time, and to enhance quality of the trajectory by upstreaming GNSS real-time correction data over a wireless data link. Concerning the UAV carrier, expanding operational limitations towards conditions that might easily be expected for ‘after-the-storm’ areas, e.g. fire, smoke or dust, will require further testing. Of course, an authorised, appropriate test field must be available to fly in such conditions. These and future tests will further prove the potential and usefulness of UAVs for disaster management and rescue task forces.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















