UAS Lidar for Ecological Restoration of Wetlands
How New Technologies Are Helping to Preserve the Environment
Wetlands are essential ecosystems which provide numerous benefits to society as a whole. But their functionality strongly depends on the hydrology and topography of the watershed, thus creating the need for monitoring. The use of terrestrial topographical survey methods can be a challenging task in wetlands, however. Flooded areas, muddy terrain and low vegetation can substantially slow down or even prevent the movement of surveyors, while tall vegetation can obstruct GPS reception. As this article outlines, advanced technologies such as airborne or UAS Lidar offer interesting alternatives for surveying the hydrology and topography of wetlands.
Wetlands are ecosystems where water meets land, such as river marshes, peatlands or flooded forests. They are often undervalued and have become globally threatened; since 1900, two thirds of natural wetlands have been destroyed. Besides conserving the remaining wetlands, there is a need to help wetlands recover from degradation or fragmentation which can cause the loss of their essential ecological functions and consequently the loss of all the benefits they provide to society as a whole. In many cases, wetland problems have originated from the alteration of the channel path or other physical characteristics, which in turn has led to habitat degradation and loss of biodiversity. Therefore, the understanding of the physical terrain structure and natural hydrology is essential for successful wetlands restoration.

Case study: Mou de Pleure bog
The Mou de Pleure bog, located in the Franche Comté region of France, is a prime example of wetlands degradation. Since the end of the 19th century, the bog has suffered wide-ranging damage. One of the most important interventions was the digging of a ditch in the 1980s to improve drainage of cultivated land. This hydrological alteration led to various negative impacts such as a decrease in water storage capacity (which normally supports flood prevention), forestation and loss of previously observed rare local species. The Mou de Pleure is one of the region’s few peatlands that is located on the plains and, according to ancient studies, it used to be the widest and the most flourishing of all the swamps on the Bresse plain. The Regional Conservatory for Natural Areas (CEN) therefore initiated a restoration project.
The use of UAS Lidar
To study the hydromorphology of the area for the restoration project, an accurate digital terrain model (DTM) was required of the bog and its watershed. A French aerial mapping operator called L’Avion Jaune, based in Montpellier, decided to use a Lidar scanner on a multirotor platform to conduct the survey.
The study area covered around 50 hectares with, in the centre of the bog, a dense wooded area along the Mou stream measuring 900m long by 200m wide. Beyond the forested area, the rest of the Mou de Pleure bog comprises meadows and cultures. The use of an unmanned aerial system (UAS), especially a multirotor unmanned aerial vehicle (UAS or ‘drone’), is typically well-suited for an area of this size, which is too extensive to be surveyed cost-effectively using terrestrial techniques but too small to perform an aerial survey using a manned aircraft. Besides that, the muddy environment and the dense vegetation make it difficult for terrestrial surveyors to access the terrain.

Another challenge in this survey is the high vegetation cover, as the degradation of the bog has led to dense forestation of the riverside land. The use of Lidar technology rather than photogrammetry, for example, is especially relevant in this case as the emitted laser pulse can penetrate in between the canopy and provide measurement points on the ground.
The L’Avion Jaune team chose to work with the YellowScan Surveyor Lidar UAV: an ultra-lightweight standalone self-powered mapping system which is easily integrated with multiple platform types. With a weight of 1.6kg, it is one of the lightest fully integrated laser scanning systems in the world. The Surveyor includes an onboard computer which controls the three main components: a Velodyne laser scanner, and a GNSS and inertial navigation system (INS) both from Applanix (APX15). The laser scanner has a 300kHz frequency, making it optimal for mapping through the vegetation cover, plus the 5cm accuracy of the GNSS-inertial solution fulfilled the study requirements.
Simple workflow
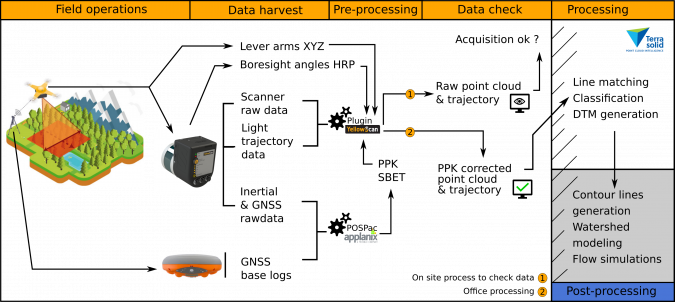
The main advantage of this UAV-Lidar combination is that it is quick and easy to operate (Figure 3). The fieldwork was completed in one day, including six flights, quality check of the data and picking up of control points. Flights were performed with 5m/s velocity at a height of 50m, with a 60% Lidar flight line overlap. Four transversal flight lines were added along the wooded area to maximize the point density of the bog.
Back at the office, the L’Avion Jaune team applied a post-processed kinematic (PPK) correction technique to the trajectory using POSPac by Applanix and used the YellowScan QGIS plugin to generate a georeferenced point cloud with the corrected trajectory. Then, several Lidar point cloud processes were achieved using TerraSolid software to generate the deliverables, including noise filtering, flight line matching and ground classification. Lastly, the point cloud was filtered to keep the ground points only and a DTM was extracted.
The Lidar point cloud generated from the QGIS plugin was already quite good; the average 3D mismatch was less than 2cm. The flight line matching applied using TerraMatch further improved the point cloud geometry, with a final 3D mismatch of less than 1cm. Ground classification was achieved using successive classification routines in TerraScan. The trickiest step was to discriminate low vegetation from the ground without smoothing microtopography, which required extensive quality checks and a few manual corrections.
Results
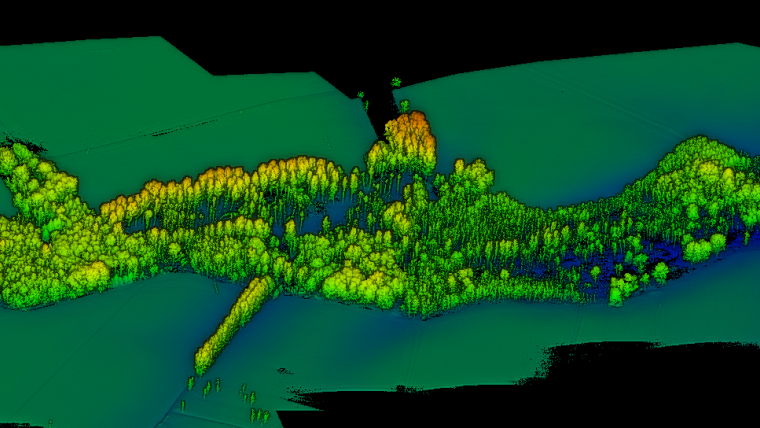
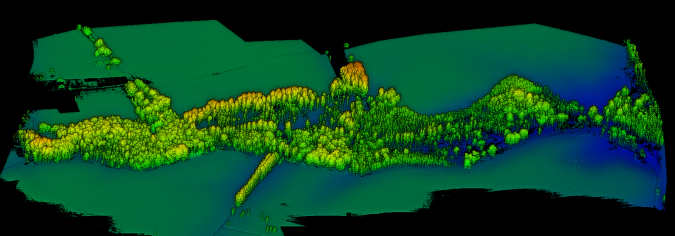
The resulting point cloud (Figure 4) had an average density of 118pts/m2 over the whole area, with point density reaching up to 280pts/m2 in some areas with crossed overlap. Flooded areas presented a lower point density because infrared light (wavelength: 905nm) does not penetrate water. However, the average point density over the bog was satisfactory (70 pts/m2).
The average density of ground points was 96pts/m2 over the whole study area, and ranged from 5 to 25pts/m2 under vegetation cover. In some specific cases, the low vegetation consisting of brambles was so dense that the Lidar beam could not reach the ground, so some blank areas remain in the dataset, although fortunately only to a limited extent.
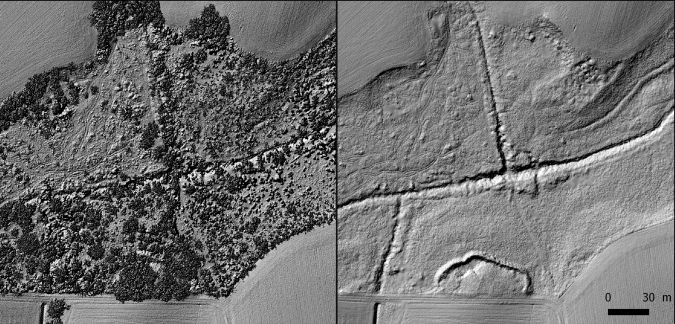
The hydrological features were easily identifiable on the resulting DTM (Figure 5). UAV photogrammetry could have produced a high-quality DSM, but would not have provided a good-quality DTM beneath the vegetation cover. To analyse the hydrology, further processing was performed by a consulting company specialized in the environment. The DTM was used to extract contours lines and to map the rivers and the streams using a watershed algorithm by QGIS. A vertical cross-section of the point cloud helped identify the key hydrological elements even beneath vegetation. The DTM was used to build a hydraulic model and to simulate flow. Ultimately, three scenarios were proposed for the restoration of the Mou de Pleure bog.
Broader perspective
Wetlands occur in almost every country and every climate, and environmental studies and restoration actions are being undertaken worldwide. UAS Lidar appears to be an effective tool to characterize hydrology and could be used in various types of wetlands across the globe. The point density may be limited in some wetlands with wet or flooded areas because the infrared wavelength hardly penetrates into water. To maximize point density, it can be useful to adapt the flight planning by increasing overlap and/or reducing flight height or speed. Topo-bathymetric Lidar data may also help to overcome this issue, although airborne bathymetric scanners are expensive and heavy items of equipment to survey small areas and the UAV bathymetric scanner offering is limited. The light penetration into dense vegetation such as brambles might be improved using a high-density Lidar system with a laser frequency of 600kHz.
This survey was completed with a multirotor UAV which is well-suited for small areas. However, more extensive areas could be more cost-efficiently surveyed using a vertical take-off and landing (VTOL) UAV. Not only is such a solution suitable for larger areas in terms of flight duration/coverage (90 minutes/700 hectares), but the vertical take-off is a real asset when flying from difficult-to-access areas.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















