
UAS Lidar survey over an ancient Pueblo site
Creating an accurate and dense digital terrain model requires expertise
Archaeologists have been studying the Sand Canyon Pueblo in Colorado, USA, for decades. Today, painstaking traditional mapping and visualizations no longer suffice for detailed studies. A survey combining an unmanned aerial system (UAS) with Lidar has shown how accurate and dense point clouds enable the discovery of previously undocumented structures. However, conducting a UAS Lidar survey requires thorough knowledge and skills, as the author convincingly demonstrates.
The Canyons of the Ancients National Monument in Colorado, USA, is an archaeologically significant landscape containing a wealth of historical and environmental resources. It is now a recreational hotspot, but around AD 1240 the area was occupied by the Pueblo community, which constructed over 70 villages housing approximately 30,000 residents. In Sand Canyon alone, over 90 subterranean structures known as ‘kivas’ were used by families as dwellings. Between 1984 and 1995, the site was studied, mapped and excavated using traditional survey techniques. To further accurately map this culturally rich site, which is managed by the Bureau of Land Management, Routescene Inc. worked in partnership with Caddis Aerial to create an accurate bare-ground digital terrain model (DTM). The approach was based on a Lidar system – which can penetrate dense vegetation and produce high point densities – mounted on an unmanned aerial vehicle (UAV or ‘drone’).
UAV
The DJI M600 Pro was chosen as the platform for its stability and high lift capacity. This UAV can sustain a flight duration of 15-20 minutes, depending on wind and other weather conditions, and captures an area of at least 400 x 400m in a single flight, enabling users to survey areas of over two square kilometres per day. Designed in 2013 for use on UAVs, Routescene’s LidarPod comprises a carefully selected array of sensors including the Velodyne HDL32. With a scan rate of up to 1.4 million points per second from 32 different lasers angled in a 40-degree field of view, this enables high vegetation penetration. The in-built radio modem not only enables command and control but also, and more importantly, allows operations – complete with real-time quality assurance (QA) monitoring – over a distance of more than 2 kilometres.

Take-off and survey
The take-off point on the main dirt road in the north of the area allowed sufficient line of sight up to the outer edges of the area (Figure 1). The UAV was flown at 40m altitude relative to the take-off point. The altitude was 20m at the west and east boundaries due to the undulating terrain, and 60m in the south due to steep cliffs. To achieve a very high DTM point density, the UAV was flown as low as was safely possible, flying at a speed of 5m/s. Setting the overlap between adjacent flight lines at 100% meant each piece of land was surveyed twice, resulting in a higher point density and more laser points hitting the ground. The flight plan was uploaded to the UAV from DJI’s GS Pro app. The M600 Pro was flown manually to the start of the mission and the flight plan was executed from within the GS Pro app. For accurate georeferencing purposes, eight ground control points (GCPs) were measured with GNSS, and 60cm-diameter Lidar targets mounted on tripods were placed over them (Figure 2). Thanks to their highly retroreflective material, the targets were easily identifiable in the point cloud. After every mission, the data was downloaded from the LidarPod and inspected using LidarViewer Pro. This proprietary software enables the user to build a Lidar processing workflow, using the Filter Development Toolkit to develop and apply filters.

Flight conditions
The survey was undertaken in October 2018. The temperature was 15-20°C in the early morning, increasing by 5 degrees at sunrise. The UAV mission planning had to take account of the altitude of 2,100m because the aircraft’s performance reduces with increasing flight height as well as due to atmospheric conditions such as temperature and humidity. Flight height and atmospheric conditions are combined in the so-called density altitude. The cooler morning air resulted in a density altitude of 2,750 to 3,050m. In addition to the density altitude, other challenges included the piloting of a newly purchased aircraft and the payload. 40% of the battery capacity was left after the current flight line had been completed and the UAV then flew back to the take-off site, typically landing with 30% capacity still remaining. This generous safety margin was deemed to be a sensible approach. The wind tended to increase mid-morning making the flying conditions even more challenging. Even so, four flights were successfully completed and the last flight line was finished just before the wind further strengthened to beyond operational limits.
Pitfalls
Since there is always a possibility that additional data will need to be collected at a later date – either planned or unplanned – it is standard practice to anticipate this by marking all GCPs using a permanent peg driven into the ground. The resurvey was conducted in the middle of winter, when the GCPs were buried under 30cm of snow cover. The data analysis revealed a discrepancy in the position of the GCPs relative to the point cloud. Extensive further analysis revealed that the errors were caused by the storage of the GCP coordinates in Microsoft Excel, which rounds all numbers to six decimal places. For geographical coordinates this introduced an inaccuracy of up to 4m. So a word of caution: beware of how survey data is captured and stored! Reloading the original raw data into another format solved the issue, but the ground surveyors were rather displeased. A lesson learned!
Results
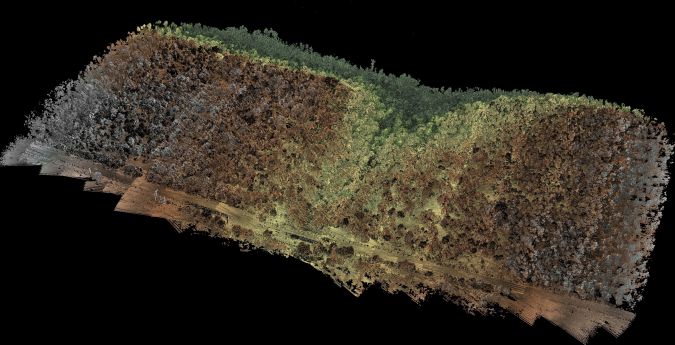
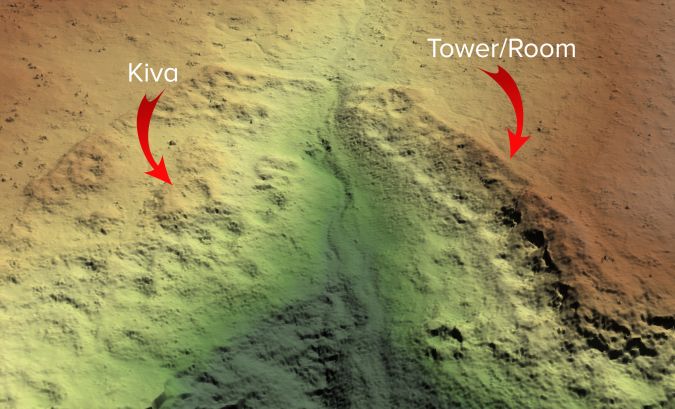
Over 3.2 billion points were collected and processed (Figure 3). The filters used in an automated sequence were sector reduction, laser ID reduction, coordinate conversion, grid creation, the purpose-built ‘bare-earth tool’, a skim grid and lastly the LAS export filter. This process virtually removed all the vegetation from the point cloud, to expose in detail the structures that the archaeologists were interested in. The point density of the final DTM was 400 points/m2 and enabled the archaeologists – much to their surprise – to discover previously undocumented kivas and other structures (Figure 4). These results, gained without painstaking ground surveys, proved to be accurate and will allow the archaeologists to focus their future work on the newly found structures.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















