UAS Mapping – Where Is It Heading?
The use of a UAS to acquire geodata for mapping purposes has evolved beyond infancy and is now rapidly maturing. How will it evolve in the foreseeable future?
The use of an unmanned aerial system (UAS) – cameras and Lidar sensors mounted on an unmanned aerial vehicle (UAV or ‘drone’) – to acquire geodata for mapping purposes has evolved beyond infancy and is now rapidly maturing. How will UAS mapping evolve in the foreseeable future? To envisage where exactly UAS technology is heading, it is appropriate to start with the big picture before examining the details.
So what is the current big picture for unmanned aerial systems? How are they embedded in today’s society? First of all, our planet is confronted with climate change. The most threatening effects are sea-level rise and lengthy heavy rainfall putting valleys, rivers, lowlands and deltas at increased risk of flooding. Each year, the world’s population expands by more than the equivalent of the total number of inhabitants in Australia and Canada combined. Less than 250 years ago, just one billion people were living on this planet. Today, that number has reached nearly eight billion. This represents an annual population growth rate of over 1% and a doubling of the population every 70 years – which is less than a lifetime for many people. Remember this when you complain about overcrowded cities! The Industrial Revolution brought the world machinery to plough, sow and harvest fields – which freed peasants from hard labour on farms, but also transformed smallholdings into industrial operations and signalled the end of the idyllic pastoral scenes immortalized in 19th-century paintings. Since then, those peasants’ descendants have continued to move around in search of work, contributing to the rapid growth of urban agglomerations. The resulting – and ongoing – societal developments have continuously increased the need for highly detailed, accurate and timely spatial data. This ever-evolving landscape forms the backdrop for examining where UAS mapping is now heading.

Persuasion Skills
The main spatial data acquisition technologies for detailed 3D mapping of sites are based on imaging devices (photogrammetry) and Lidar sensors (laser scanning). The processing software to extract meaningful information from the data is greatly supported by the achievements of the computer vision research community over the last four decades. The major semi-finished products are point clouds. Cameras and Lidar sensors can be mounted on a wide variety of platforms or carriers, including vehicles and aircraft. Platforms operating outdoors, such as manned aircraft and cars, are usually equipped with GNSS and an inertial navigation system (INS) to accurately determine the six exterior orientation parameters of the sensors (3D position and orientation of the sensors in space). To improve reliability of georeferencing, additional sensors are often used such as wheel counters and compasses. The use of ground control points further enhances the geometric accuracy of the data. Thanks to simultaneous location and mapping (SLAM) algorithms, indoor mapping has become possible using trolleys, backpacks or handheld solutions. The decision for a specific platform depends on the application, size of the survey area, severity of disruption to human activities (e.g. interference with train timetables), required accuracy and level of detail, costs, instruments available at the surveying firms and the ability of those firms to communicate the benefits of their solutions to potential customers.
Miniaturization
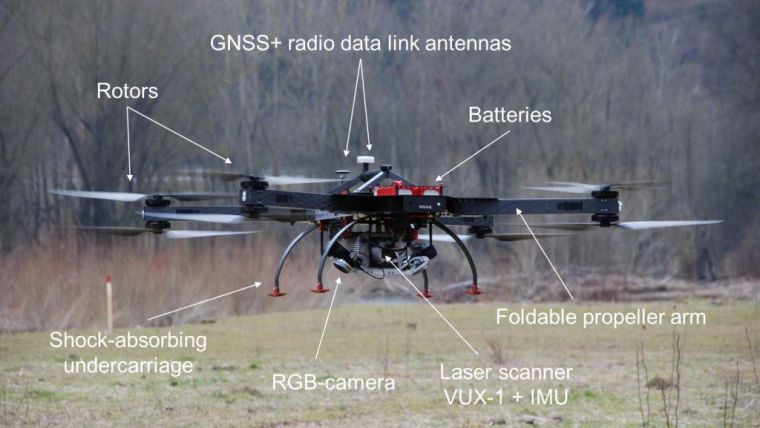
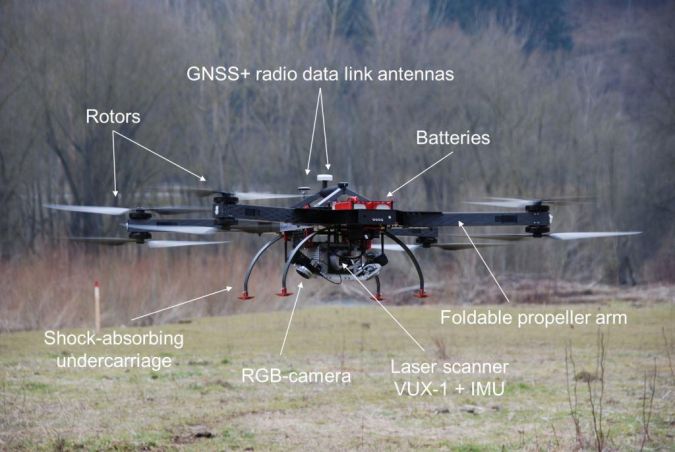
On the flip side of societal developments are the technological advances. The key trend in the evolution of UAS mapping can be summarized as the miniaturization of components. Cameras and Lidar sensors suited for capturing high-quality data are becoming smaller and lighter, propped up by advanced processing software which facilitates the use of calibrated metric cameras and heavy Lidar sensors for precision solutions. Today’s positioning and orientation systems (POS) based on GNSS and INS can be held in the palm of one’s hand. The miniaturization of rotors, electric engines and batteries, in combination with carbon-fibre frames, has enabled the construction of lightweight UASs without compromising air stability. On such systems, camera(s) and Lidar (sensors) can be mounted abreast for the simultaneous capture of images and Lidar point clouds. Concurrent capturing of Lidar point clouds and photogrammetric images has proven to be beneficial for 3D mapping of built-up areas.
Hot Spots
As illustrated by the numerous case studies published in GIM International in recent years, the UAS has proven its suitability for many 3D mapping applications, including at archaeological sites, industrial complexes, power stations, open-pit mines and construction sites. The use of UASs for capturing such sites will continue to flourish. Particularly, UAS photogrammetry is routinely used for mapping, inspection and monitoring of such sites. The projects concern individual buildings, small areas of interest and other isolated outdoor sites. Vast areas, such as urban agglomerations, are usually three-dimensionally mapped by selecting one geodata acquisition technology (often aerial photogrammetry) for the entire territory. That means all spots are treated equally. However, it is not always a case of ‘one size fits all’; some spots are more equal than others. Choosing one technology based on the greatest common denominator results in a dataset in which some spots are captured at the right level of detail while others are over-detailed or under-detailed. By complementing a UAS with trolley-based, backpack or handheld mobile mapping systems, under-detailed spots can be captured at the desired level of detail.
Circular Economy
The ongoing miniaturization of carriers and sensors in conjunction with SLAM algorithms for positioning and orientation purposes has also made it possible for copters to manoeuvre through indoor spaces. Equipped with cameras and/or laser scanners, they can collect high-density point clouds. The high level of detail and accuracy of the data helps facility managers to inspect their property. It also supports the creation of 3D cadastres, which are aimed at recording the ownership of volumetric parts of buildings and other constructions. Authorities and citizens alike are convinced that wasting fuel and other resources as well as the emission of harmful substances should be minimized through reuse, refurbishment and/or the use of alternatives in pursuit of the circular economy. The main consequence is that sites where humans are active, including agricultural lands and mines, need to be mapped and monitored in ever-greater detail. Within today’s industrial agriculture, for example, the collection of spatial data supports regular inspections to avoid waste of fertilizers, fuel, seeds and water. A UAS is well-suited for capturing such spatial data on a regular basis. When it comes to indoor mapping, UAS and mobile mapping complement rather than compete with one another. For example, if used indoors a UAS could collide with objects or people, causing damage and possibly injuries, making it useless in crowded indoor environments. In such a setting, mobile mapping is a perfect solution. In addition, the two platforms have different perspectives (i.e. view angles): sideways-looking versus image capture from above.
Building information modelling (BIM) plays an essential role in the circularity mindset, since information on the types and quantities of construction materials used is key. Such an information system, which is also needed for the inspection and maintenance of indoor and outdoor spaces, could be called a building materials cadastre.

Bottlenecks
Ever since the emergence of computers, it seems to have been a rule of thumb that the amount of data acquired by sensors is ten times as much as the processing capacity of computers – so it’s no wonder that so many researchers are throwing themselves into data science and artificial intelligence to speed up the processing of geodata. Another major bottleneck preventing the rapid introduction of UASs in several applications is that many professionals seem reluctant to replace tried-and-tested technology with a novelty that has a non-proven outcome – even though it may be convincingly cheaper and demonstrably more efficient.
Essentials
There are four essential ingredients determining data quality (i.e. accuracy and detail) in 3D mapping systems: the sensors, the software, the platform and, above all, the survey plan. The design of the survey plan requires thorough knowledge, skills and expertise. This is where the geomatics specialist comes in. Given the strong societal needs for geoinformation outlined above, it is odd that universities in so few countries offer bachelor-level geomatics degrees; at best, the subject is usually on offer at master’s level only. There is a serious risk that society will pay the price for this in the future and be forced to increasingly depend on the less specialized knowledge of the multinational informatics industry.
Further Reading
Lemmens, M. (2020) Capturing Lidar and Imagery Simultaneously, GIM International, 34(1), pp. 10-13 URL link

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















