Developing a virtual laser scanner for training and research
VRscan3D: a terrestrial laser scanning simulator
The VRscan3D project has developed a virtual terrestrial laser scanner simulator as a training tool to support the learning of laser scanning processes. It is intended for use by universities and other groups that have limited or no access to actual terrestrial laser scanning equipment. This virtual solution also fits in well with the digitalization trend in teaching, which has been accelerated by the COVID-19 pandemic. The project has been funded by the German Academic Exchange Service (DAAD).
Digitalization is a worldwide trend that is affecting almost every industry. There are numerous signs of this in the geospatial industry, of course, but also in the teaching sector. The ongoing COVID-19 crisis has demonstrated that digitalization of teaching is not only an option, but also an indispensable necessity in the present reality. The pandemic has particularly affected those academic programmes where classroom teaching is unavoidable, such as in practical courses requiring the use of surveying equipment. The recent critical situation in education has therefore accelerated the transition to online teaching.
Besides this, academic institutions have a responsibility to educate their students in line with the current needs and demands of the professional market and industry, including how to use the latest technology and perform subsequent data processing. However, today’s laser scanners typically cost between €15,000 and €80,000 per device. This makes it difficult for some educational institutions, especially in less developed countries, to provide such devices for training purposes. In that context, virtual systems can offer a cost-effective, flexible and future-oriented solution.
VRscan3D capabilities
The VRscan3D project has been set up to develop a virtual laser scanner simulator and related training concepts to support universities and user groups that have limited or no access to actual terrestrial laser scanning (TLS) equipment. The main intended target groups for the VRscan3D simulator are students and teachers of in geomatics, heritage, construction and other related higher-education departments with limited access to expensive TLS equipment. The virtual tool allows the simulation of all processes in the TLS fieldwork phase and generates results comparable with the data generated by actual scanners on-site. These results can be further processed in common software packages, analogous to real surveying practices.

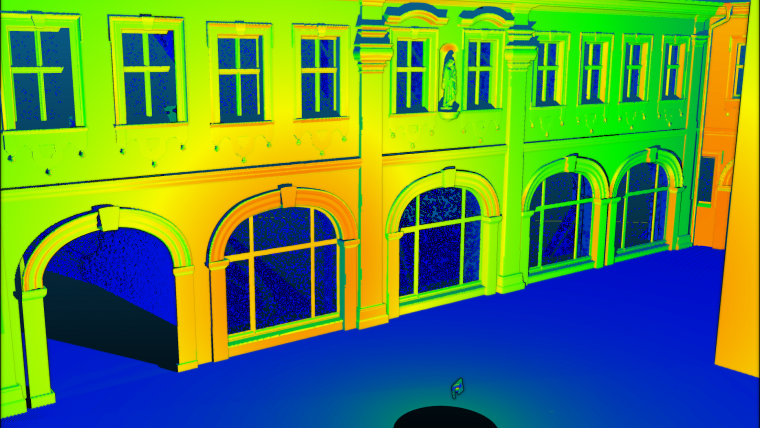
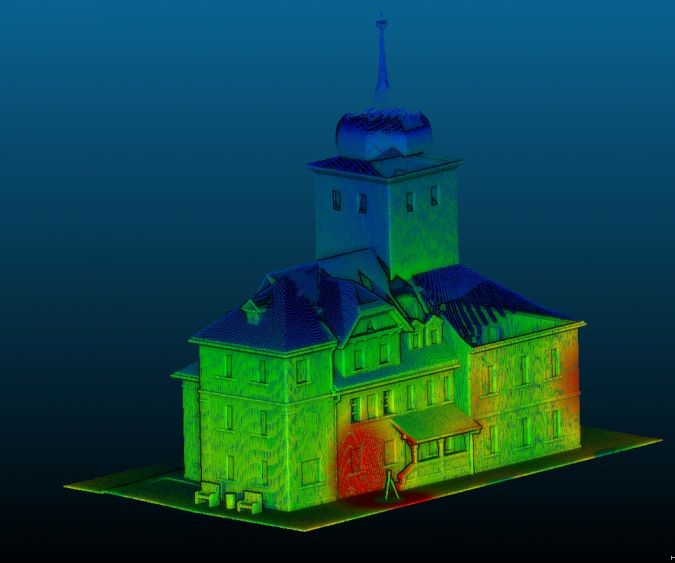
Using the VRscan3D simulator developed so far, it is possible to create realistic environmental scenarios that largely meet the requirements of practical projects. Users can interactively move an avatar, define measuring stations and targets, select different scanner types with their respective specifications and use custom settings. During simulation, an angular grid of beams is projected from the centre of the scanner. The intersection of each beam with the closest surface gives the discrete point coordinates. These are enriched with noise and intensity values. The maximum range of surface search is limited to the scanner’s range specification. The simulation results in a structured 3D point cloud in different file formats for import into further processing software. For each scan station, a single point cloud is generated in the local scanner coordinate system. Moreover, 3D models/digital twins of real-world objects, such as buildings or sites, can be created and integrated into the simulator environment (Figure 1).
Technical details
VRscan3D has been developed within Unreal Engine, so the user’s computer must be compatible with its minimum requirements. The main simulator functions are programmed with Unreal Engine’s Blueprint Visual Scripting system. That makes the system very flexible and allows modifications of software modules without recompiling the whole code. Some modules were programmed in the C++ language due to Blueprint limitations and to improve the overall performance of the software. Virtual environment 3D models (in IFC format) are imported into Unreal Engine using a Datasmith plugin.
The product functionality includes the following features:
- selection of the scanner model which will be simulated
- laser scanning process simulation to obtain point clouds with intensity and noise values based on scanner specifications and object materials
- scan station management, which allows users to specify settings (resolution) for each scan station and to create, move and delete stations
- target management which allows placement and removal of different types of targets (checkerboard and spherical)
- project management, which allows projects to be saved for continuation later
- batch scanning, i.e. placing multiple scan stations at the same time and triggering scanning simulation for all stations one by one
- real-time visualization of the scanning process and the generated point clouds
- exporting the point cloud in standard file formats for post-processing
- generation of spherical panorama images.
Unlike real-life scanning, in which the speed depends mostly on physics, the speed of the simulation depends on several factors, namely:
- computing power
- openness of the environment
- presence of surfaces that reflect or refract the laser beam
- noise simulation.
Computing power has a direct impact on the scanning speed; a faster CPU and GPU provide faster simulation. At the same time, the simulator does not require a large amount of memory, as simulated points are stored in the RAM for a short time and are then written directly to disk. Memory consumption is typically at 0.5-3GB, depending on the scan settings and environment. The simulation is also faster for open environments, as the number of calculations is significantly reduced when the laser beam does not hit a surface. The presence of reflective surfaces slows down the simulation speed, as this entails additional calculations of the reflected laser beam and intensity. Since the simulation of range and angular noise requires very simple calculations, its effect on scanning speed is less than 1%.

The virtual scanning process
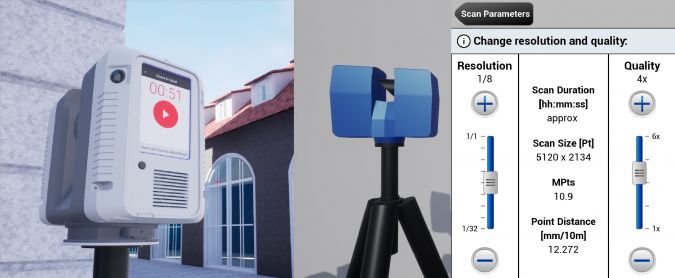
A basic generic scanner and three commercial scanner models have been implemented so far, and the list of implemented scanners will be continuously extended. The access to scanner settings is implemented through realistic interfaces of the selected scanner models (see Figure 2). The user can select scanning parameters and alter the instrument height (which is set to 1.60m by default). It is also possible to change the scanning position or remove a station.
The simulator offers two work scenarios:
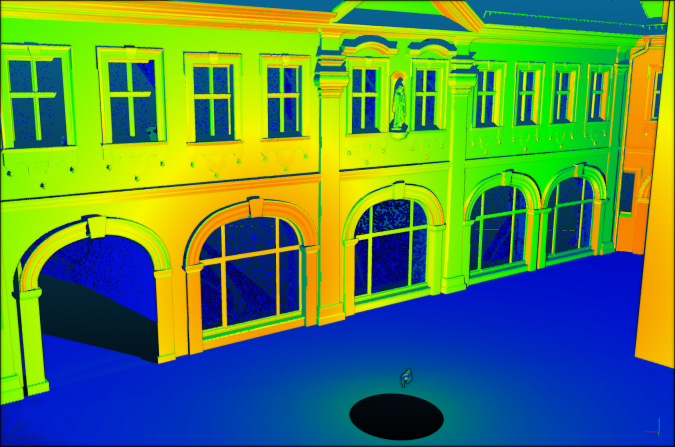
1) The user is navigating within the virtual environment and selects and places target positions as in real life. Then the scanner position and scan settings are specified and the scanning process of the virtual device is started (Figure 3). The progress of point-cloud collection is visualized in real time by a projected scanner beam. When the scanning is finished, the user avatar ‘goes’ to the next station.
2) The user navigates within the virtual environment and selects positions for all targets and all scan stations. Subsequently, scan settings are specified either for all stations or for each station separately. Lastly, the scanning simulation is started for all stations in batch mode.
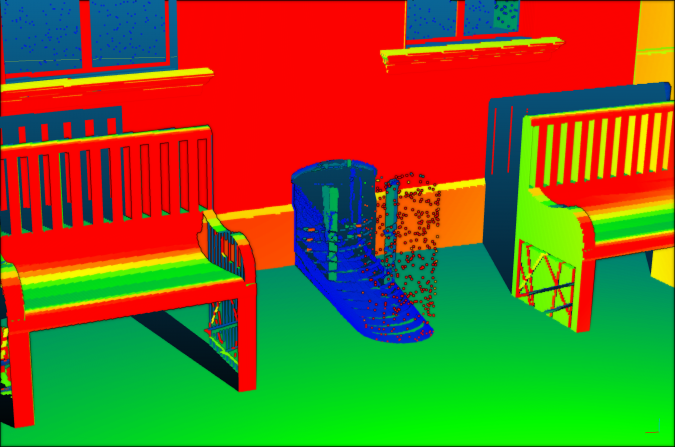
In the most recent version of the software, noise and intensity simulation has been implemented based on mathematical and physical models. Since simulated material properties are available (specified during modelling) for each part of the 3D scene model, noise and intensity are simulated as a function of material characteristics, scanner specifications and reflection properties. The most recent version of the software also simulates laser beam propagation and reflections from glass and other highly reflective surfaces (Figures 4 and 5).
After occupying/simulating as many stations as needed to cover the virtual object, data is stored as a text file (txt or ptx) on a hard drive. E57 format will be available in the near future. The whole sequence of scanning can be simulated in a digital environment, thus generating realistic scanning data which can later be processed, registered and used in the entire data processing chain (Figure 6).
Conclusion
It can be concluded that VRscan3D:
- offers a useful 3D laser scanning visualization that can be used in a hands-on explanation of how to use a TLS device
- is easy to operate and offers all the performance of modern game environments
- helps the user to learn basic terrestrial laser scanning parameters and interface usage, and is useful for planning individual workflows
- allows the generation of simulated scan data comparable with real data, including noise, intensity, panoramic images and reflections
- can replace real-life instruments for practical training if there is no access to actual equipment (e.g. due to costs)
- is a useful tool for distance learning courses, e-learning and online teaching
- can be used for research and development by creating ground truth scan data
- offers new options for marketing scanner products.
VRscan3D is available as a free demo version providing a generic scanner model and a limited number of scanning stations. A full version with different scanner models and unlimited functionality will be available in due time.
Further reading
Chizhova, M., Popovas, D., Gorkovchuk, D., Gorkovchuk, J., Hess, M., Luhmann, T., 2020: Virtual terrestrial laser scanner simulator for digitalization of teaching environment: Concept and first results. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XLIII-B5-2020. https://doi.org/10.5194/isprs-archives-XLIII-B5-2020-91-2020
Chizhova, M., Gorkovchuk, D., Kachkovskaya, T., Popovas, D., Gorkovchuk, J., Luhmann, T., Hess, M., 2021: Qualitative testing of an advanced terrestrial laser scanner simulator: users experience and feedback. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., 43, 29-35. https://doi.org/10.5194/isprs-archives-XLIII-B5-2021-29-2021
Popovas, D., Chizhova, M., Gorkovchuk, D., Gorkovchuk, J., Hess, M., Luhmann, T., 2021: Virtual terrestrial laser scanner simulator in digital twin environment. Proceedings of the joint international event 9th ARQUEOLÓGICA 2.0 & 3rd GEORES, Valencia (Spain). https://doi.org/10.4995/Arqueologica9.2021.12091

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















