
Handheld Mapping of One of Europe’s Largest Caves
Putting SLAM Technology to the Test Deep Underground
Geospatial mapping specialists and technology from GeoSLAM have been involved in a project to map the Lombrives cave in southern France.
The Human Adaption Institute conducted a pioneering isolation experiment called ‘Deep Time’ in one of Europe’s largest cave systems: the 3km Lombrives cave. With low light levels, an ambient temperature of 10⁰C and 100% humidity levels, the physical and psychological impacts of the environment were monitored closely. The study was supported by geospatial mapping specialists and technology from GeoSLAM.
For the 15 participants in the Deep Time experiment, time really did stand still recently – and not just due to coronavirus lockdowns. They set up camp in the Lombrives cave in Ariege, in the eastern part of the Pyrenees mountain range in southwestern France, to spend 40 days with no clocks, no sunlight and zero contact with the outside world. The study, created to gain insight into the constraints of human adaptability to isolation, tested the limitations of human endurance in a challenging environment.
Forming a community of ‘Deep Timers’, the participants were each assigned specific roles and responsibilities, carrying out tasks to provide a sense of structure to their days. During the project, each member of the team performed over 50 scientific tests and protocols daily – from cognitive and sensory ability testing to genetics. Their first task was to create an in-depth, complete scan of the location using GeoSLAM’s simultaneous localization and mapping (SLAM) technology.
The project posed a number of complex challenges, including unskilled surveyors, a demanding cave environment and time pressure to complete the scan, not to mention the absence of any GPS in the cave. Traditional tripod-based systems for digital mapping would have presented a number of difficulties for such a job. As well as requiring professional surveyors to accurately set up the devices, the uneven, challenging terrain would have caused many other complications, resulting in a labour-intensive and time-consuming method of data collection. In contrast, the benefit of the ZEB Horizon handheld SLAM scanner meant that anyone could simply ‘pick up and go’ to create a detailed point cloud of any location.

Challenging circumstances
To form a clear picture of their new surroundings, the team conducted a digital scan of the complex cave system, consisting of both narrow passageways just big enough to crawl through and vast chambers up to 70m in height. With a collection rate of 300,000 points per second, an accuracy of 1-3cm (depending on the scan environment) and the ability to capture intricate measurements with a 100m range capacity, the handheld ZEB Horizon scanner overcame these issues. The easy set-up and ‘walk-and-scan’ method of data collection offered the team the flexibility to crouch, crawl and scan the depths and narrow canals of the cave. Combined with fully automatic processing, they were able to create accurate and reliable results at speed.
Although primarily a handheld device, the scanner can also be mounted to an unmanned aerial vehicle (UAV or ‘drone’) to carry out aerial surveys. The use of drones with scanners can provide surveyors with significant advantages in cave or mining environments. When faced with areas prone to collapse which would otherwise be unsafe for human surveyors to enter, a UAV offers a quick and safe method of inspection. This approach is therefore often used to enable miners to inspect a mine following a planned detonation to ensure the structure is safe.
While these applications offer huge benefits to protecting the safety of participants, the use of UAVs in both caves and mines is reliant on the space and visibility to operate the SLAM-equipped drone safely. In the Deep Time experiment, the scanner could be mounted onto a cradle or extendable pole to access the difficult-to-reach and potentially hazardous areas of the cave, both in the cave’s dark depths and in its high cavities. This additional equipment not only granted the team access to all parts of the cave, but also ensured their health and safety while carrying out the survey in what was an almost pitch-black environment.
Shut off from the outside world
Many traditional digital mapping device programmes rely heavily on GPS to provide points of origin for accurately calculating distance and scale. However, with parts of the Lombrives cave up to 90m beneath ground level, this method of data collection would have been impossible.
Thanks to not requiring the aid of satellite positioning, SLAM technology enables scans to be carried out in complex and enclosed spaces, including deep underground. Using statistical and mathematical algorithms, a SLAM device simultaneously locates itself within a scan and map, creating a virtual 3D image of the location, using Lidar sources in combination with basic positional data provided by an inertial measurement unit (IMU). This method allows the device to track its own position, while compiling an accurate and complete 3D point cloud of the surrounding environment.
The self-sufficient internal coordinate system of the ZEB Horizon scanner used known control points throughout the cave. It could be manually georeferenced using GeoSLAM’s Adjust to Control feature or automatically georeferenced using the Connect software.

The end result
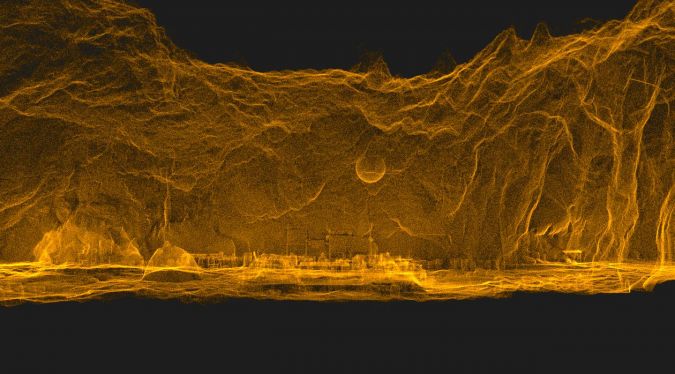
The processing software automatically connected together a series of 3D scan datasets containing more than 39 million points, resulting in the successful mapping one of Europe’s largest caves. The team were subsequently able to reduce scan drift and remove outlying data points in the software to provide a clear visualization of the location, plus they were able prioritize planar surfaces, which is particularly beneficial in these noisy environments.
Thanks to the versatility of the SLAM-based scanning technology, the participants were able to defy the challenges presented by the demanding environment in the Lombrives cave. The Deep Time project members were able to scan the underground environment quickly and accurately while remaining safe throughout the duration of the experiment.
Further reading
Interactive sample data of the Grotte De Lombrives.



Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















