Lidar technology for scalable forest inventory
Evaluating the trade-offs between the various platforms
When considering Lidar technology for forest inventory, it is essential to evaluate the trade-offs of each platform. This article provides some pointers.
There is a critical need for rapid, rigorous, reproducible and scalable forest inventory tools to support data-driven policies and management practices in response to challenges including deforestation and climate change. Lidar technology offers an alternative for automated forest inventory at various scales, but each platform has trade-offs in terms of cost, efficiency, coverage, resolution or more. So what is the solution?
Forests are a globally dominant ecosystem, covering nearly 40% of the Earth’s land area. They provide critical services such as fibre, timber, fuel, carbon dioxide removal, water supply filtering, flood erosion control, recreation and biodiversity sustenance. However, they are constantly challenged by various stressors. As the human population continues to grow, deforestation activities are on the rise to meet the need for material, agricultural land and urban developments. Such stressors are exacerbated by intensified climate change. These challenges are calling for immediate attention, which was raised by the United Nations Department of Economic and Social Affairs in its Global Forest Goals Report, 2021. In this report, six goals are set to ensure global forest sustainability. It was emphasized that meeting these goals requires data-driven policies and management practices, powered by accurate/comprehensive inventory.
Examples of essential forest data for proper management include tree count, species, health, height, stem diameter, straightness, taper affect, branch number and branching order/angle. This information is essential for forecasting wood production, timber value, and carbon sequestration rates. Traditionally, inventory of such traits has been conducted manually, which is expensive and time-consuming. Just as an example, the United States Forest Inventory and Analysis (FIA) programme spends close to US$100 million annually to inventory 18,000 acres, which corresponds to only 0.002% of the total US forest area. Other than the USA and EU, forest inventory programmes are almost non-existent around the globe. Therefore, there is a critical need for rapid, rigorous, reproducible and scalable inventory tools.
With advances in sensor and algorithmic technologies, remote/near-proximal/proximal sensing – including imaging and Lidar systems onboard space/aerial vehicles, stationary terrestrial laser scanners (TLS) and terrestrial mobile Lidar – has recently been explored as an alternative for automated forest inventory at various scales. These sensors/platforms have trade-offs in terms of cost, field survey efficiency, spatial coverage, spatial resolution and level of detail of the acquired information. Figure 1 shows two examples of potential data acquisition systems (near proximal and proximal) for fine-scale forest inventory.

Space imagery and airborne Lidar
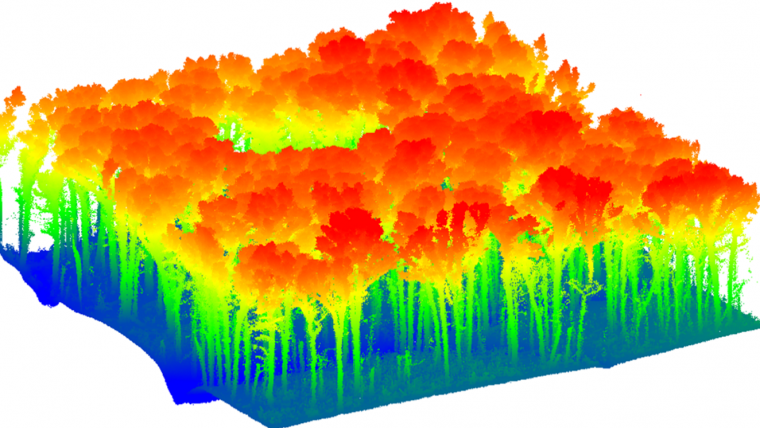
Space imagery and Lidar data facilitate global and national forest inventory. However, limited spatial and temporal resolution would not allow for fine-scale inventory at the single tree level. Photogrammetric processing of images acquired by spaceborne and crewed aerial systems has attracted the attention of the forestry research community for estimating inventory attributes such as tree height, stem volume and basal area. However, image-based point cloud generation is challenged by the difficulty in identifying corresponding points in overlapping images over forest landscape during both leaf-on and leaf-off conditions. Moreover, derived point clouds from imagery only capture the outer envelope of the forest canopy. Airborne Lidar provides large spatial coverage, fine resolution and the ability to represent the outer envelope and below-canopy structure. Lower canopy mapping is facilitated by the fact that Lidar energy can travel through gaps among the trees/leaves and derive returns from tree trunks and terrain. Such ability makes Lidar an attractive modality for deriving ground slope and aspect, stem map, canopy height, crown dimension and leaf area index (LAI), to name but a few traits. The point cloud in Figure 2 illustrates the level of detail that can be discerned in forest Lidar data captured by an airborne remote sensing system.
The large majority of airborne Lidar systems are based on linear Lidar technology, which is characterized by a high-power signal emission and a low-sensitivity receiver for detecting echo returns. Linear Lidar is based on emitted laser pulses with some nanosecond pulse width at wavelengths from 500nm (for bathymetric Lidar) to 1.5μm (for topographic Lidar). The echo returns are then digitized by the receiver. To discriminate signal return from noise, linear Lidar utilizes a single-detector receiver that requires a flux of hundreds or thousands of photons. Such characteristics of linear Lidar impose constraints on the flying height, platform speed and lateral distance between neighbouring flight lines to ensure the delivery of point clouds with reasonable point density.

Beyond the constraints of linear Lidar
Recent developments in Lidar technology are alleviating these constraints. For example, Geiger-mode Lidar (GM-Lidar) has a low power signal emission coupled with a high-sensitivity receiver. GM-Lidar has a large beam divergence angle leading to a sizable laser beam footprint. The returning signal from the footprint covers the entire field of view (FOV) of a 2D receiver, which consists of an array of Geiger-mode Avalanche Photodiode (GmAPD) detectors. The GmAPD detectors are designed to be extremely sensitive in that they can record the reflected energy at the single photon level. These characteristics allow for data acquisition at a much higher altitude/flying speed while providing relatively high point density, thus reducing the cost of the data acquisition and product delivery. However, airborne Lidar data from crewed aerial vehicles might not have the necessary resolution for fine-scale forest inventory (e.g. DBH, stem map and woody debris detection).
Pros and cons of UAVs
Compared to crewed aerial systems, uncrewed aerial vehicles (UAVs) have a clear advantage in terms of their low cost, ease of deployment, rapid acquisition, ability to deliver fine-resolution products and higher frequency of field surveys. UAV imagery and orthophoto mosaics can be used to derive some inventory traits (e.g. tree count, species, height). However, they are still lacking due to their limited below-canopy mapping ability. UAV-Lidar has the same advantages of airborne Lidar captured by crewed aerial vehicles except for reduced spatial coverage. UAV-Lidar data has been used for segmenting individual trees and estimating canopy cover, tree height, DBH, woody debris volume and above-ground biomass. Nevertheless, with above-canopy flights, the ability of UAV-Lidar to map below-canopy features is limited by tree density and leaf cover. Detailed below-canopy mapping – which is necessary for deriving accurate estimates of critical forest biometrics such as DBH, woody debris volume and under-canopy structure – is not always guaranteed.

The use of terrestrial systems
Terrestrial systems, including terrestrial laser scanning (TLS) and terrestrial mobile Lidar, can capture detailed below-canopy information. High-quality data from TLS can be used for deriving forest structural metrics at the stand level. However, large field surveys and data post-processing using TLS are complex and time-consuming, so limited spatial coverage is the norm. Terrestrial mobile systems, on the other hand, can manoeuvre within the site to obtain large spatial coverage while mitigating occlusions. The backpack system in Figure 1 is an example of such mobile ground Lidar. Lidar data derived from such systems can be used for stem map generation, DBH estimation, crown segmentation and woody debris detection. However, point clouds from ground systems are prone to occlusions owing to terrain and above-ground objects. In addition, obstacles on the forest floor can restrict platform movement. Therefore, complete coverage of a forest stand using terrestrial mobile Lidar would require careful planning of the system’s path during the data acquisition campaign. To derive meaningful point cloud data from terrestrial mobile Lidar, the platform’s position and orientation (i.e. trajectory) must be accurately estimated. Trajectory estimation can be directly established using an integrated global navigation satellite system/inertial navigation system (GNSS/INS).

The main challenge in using GNSS/INS for trajectory estimation is the intermittent access to the GNSS signal, which is crucial to deriving accurately georeferenced mapping products from the onboard sensors. For short GNSS signal outages, the onboard INS can bridge such gaps leading to reasonable trajectory, whose quality is governed by the grade of the INS inertial measurement unit (IMU). For longer GNSS signal outages, the system trajectory will lead to non-meaningful point clouds (see Figure 3). To mitigate such deterioration, the research community has been focusing on establishing Lidar-based simultaneous localization and mapping (Lidar-SLAM) algorithms (see Figure 4). However, relying on SLAM only would produce point cloud data that might not be well georeferenced in a global sense. Therefore, SLAM-based strategies for terrestrial mobile Lidar aided by airborne datasets would ensure the positional quality of the mapping product.

Evaluating the platform trade-offs
In summary, spaceborne, airborne and terrestrial mobile Lidar all provide above and below-canopy point cloud data. However, there are trade-offs between the resolution, acquisition cost and extent of covered area depending on the platform used. For example, data acquisition using crewed airborne systems is quite expensive and cannot collect data at a reasonable temporal resolution. Meanwhile, UAV-based Lidar surveys are cost-effective, but cannot provide high-resolution forest metrics at the single tree level for large-area coverage. Compare this with static terrestrial Lidar systems which, while providing high-resolution data, suffer from occlusions and require extensive fieldwork to cover small areas. In contrast, terrestrial mobile Lidar systems can only cover small areas and suffer from GNSS signal outages, which impact the quality of derived products. Figure 5 illustrates Lidar point clouds for the same tree captured by different platforms leading to varying level of details that could be discerned from such data.

The solution to such challenges can only be achieved through effective fusion of spaceborne, airborne and terrestrial platforms. For example, machine learning strategies can be developed using fine-scale terrestrial mobile Lidar data. These strategies can be then scaled up to deal with airborne and spaceborne datasets. This scaling up would only be possible through ensuring the georeferencing quality of these multi-scale/platform/temporal datasets (Figure 6). Ensuring the georeferencing quality and developing efficient data processing algorithms allow for the derivation of point clouds for fine-scale representation (i.e. digital twinning) of the individual trees, as can be seen in Figure 7. Although Lidar data can provide a high level of detail for fine-scale inventory, it still lacks in terms of providing the necessary spectral information for tree species identification and forest health analysis. Recent developments in hyperspectral imaging and multispectral Lidar technologies will be quite valuable in this regard.


Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















