UAV Photogrammetry Software: What Should You Know Before Buying?
A Guide to Several Affordable Solutions
The incredible diffusion of unmanned aerial vehicles (UAVs) has pushed many companies and research groups to implement dedicated software for the processing of data acquired by these devices. The number and the completeness of these software solutions have constantly increased with the aim to satisfy a growing and heterogeneous market. Depending on the scope of the UAV acquisitions, the experience and technical skills of the operator as well as the available budget, there are several affordable solutions already available on the market. The holistic software probably does not exist, but some features and options should be considered when approaching these instruments in order to find the optimal solution for one's needs.
The software should be able to upload and process images and videos acquired with different sensors. With this we include the RGB cameras that can be hosted in the payload, but also terrestrial and airborne sensors because UAV data is more often integrated in a unique image block with other acquisitions. When videos are acquired, the software should be able to optimally extract the best frames (also in terms of image quality) allowing the photogrammetric process. Several multi (and hyper) -spectral as well as thermal cameras are nowadays available on the market. Their adoption in some applications makes use of their efficient processing in the software, though their resolution and geometry are suboptimal for purely photogrammetric processing. Their easy integration with RGB images can also be very valuable in several applications.
Image processing
The image processing is normally performed according to “modern” and automated photogrammetry and computer vision algorithms. Depending on the user expertise, turn-key solutions (with reduced options) can be preferred to more technical and rigorous approaches. Default parameters can give quite good solutions in most practical cases. However, the possibility to modify the parameters and their weights can be preferable to improve the results, especially in the most challenging cases. Tunable parameters can be beneficial both in the image orientation and dense point cloud generation phases. Even if the automation is a priority, small tools for adding tie-points in critical image orientations or removing mismatches in the generated dense point clouds can also be important for the effective processing. The same is valid for true-orthoimages and meshes generated from these datasets: simple manual or semi-automated editing tools to “polish” the results allow the faster delivery of these products without the need for external software like image and 3D model editors. Last but not least, a clear focus should be given to the results report in each step of the processing: a solution with a thorough statistical description of the achieved results is mandatory when the accuracy of the 3D reconstruction is a requirement of the work!
UAV applications
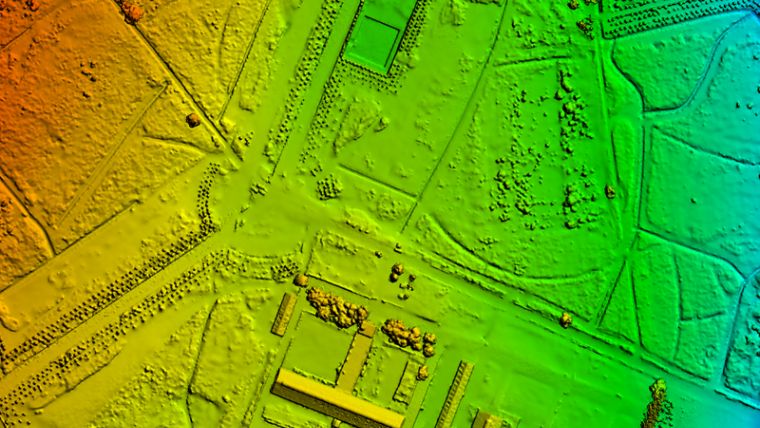
UAV applications are increasing in complexity and the delivery of products beyond the classical photogrammetric workflow is becoming more common. Automated DTM extraction, scene classification exploiting both images and point clouds as well as detection and tracking of features of interest are necessary in many applications. In this regard, software capable of automatically or semi-automatically generating this kind of information can be very helpful in terms of productivity.
The battery endurance and the productivity of UAVs have largely increased, with the consequence that bigger amounts of data are collected and heavier computations are needed to process these images. Luckily, most of the photogrammetric algorithms can be parallelised and software exploiting multi-core and graphical computing can therefore mitigate this problem. Recent software able to support the processing on clusters or on the cloud can represent another efficient solution to reduce the computational time and increase the productivity.
The UAV world is rapidly changing and the software dedicated to these applications too: the above mentioned points are some (but not all) of the aspects that should be considered when purchasing software for UAV data processing. How to find the most suitable solution depends on the capability to define our priorities and assess their implementation in the available software.

Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)






















